Liu Xiaoming, Li Yuyang, Liu Fengyu, Shi Qing, Dong Lixin, Huang Qiang, Arai Tatsuo, Fukuda Toshio
Key Laboratory of Biomimetic Robots and Systems, Ministry of Education, State Key Laboratory of Intelligent Control and Decision of Complex System, and School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China.
Key Laboratory of Intelligent Flexible Actuation and Control in Universities of Jiangsu Province and School of Mechanical Engineering, Jiangsu University, Zhenjiang 212013, China.
Sci Adv. 2025 Mar 28;11(13):eads8167. doi: 10.1126/sciadv.ads8167.
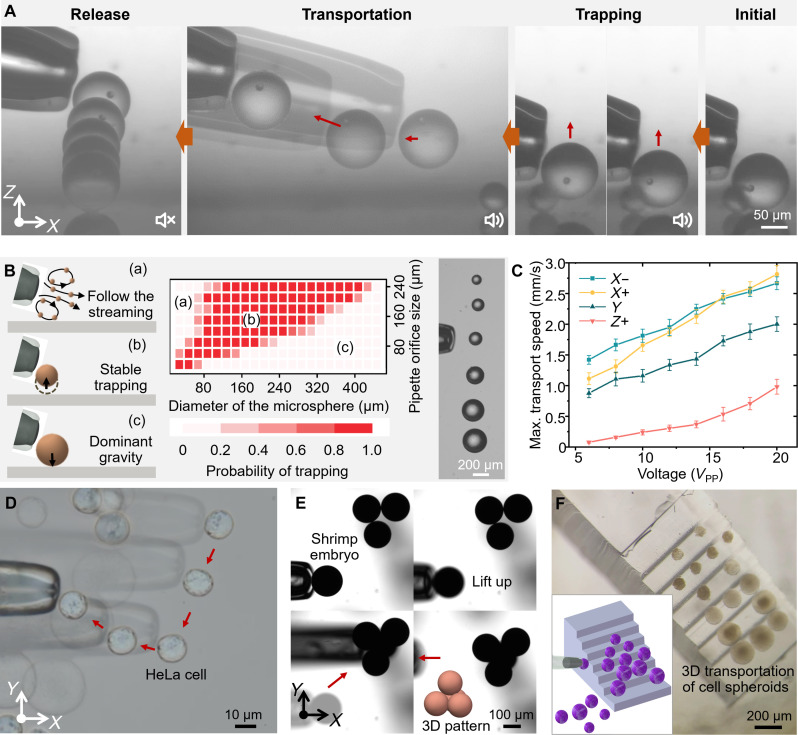
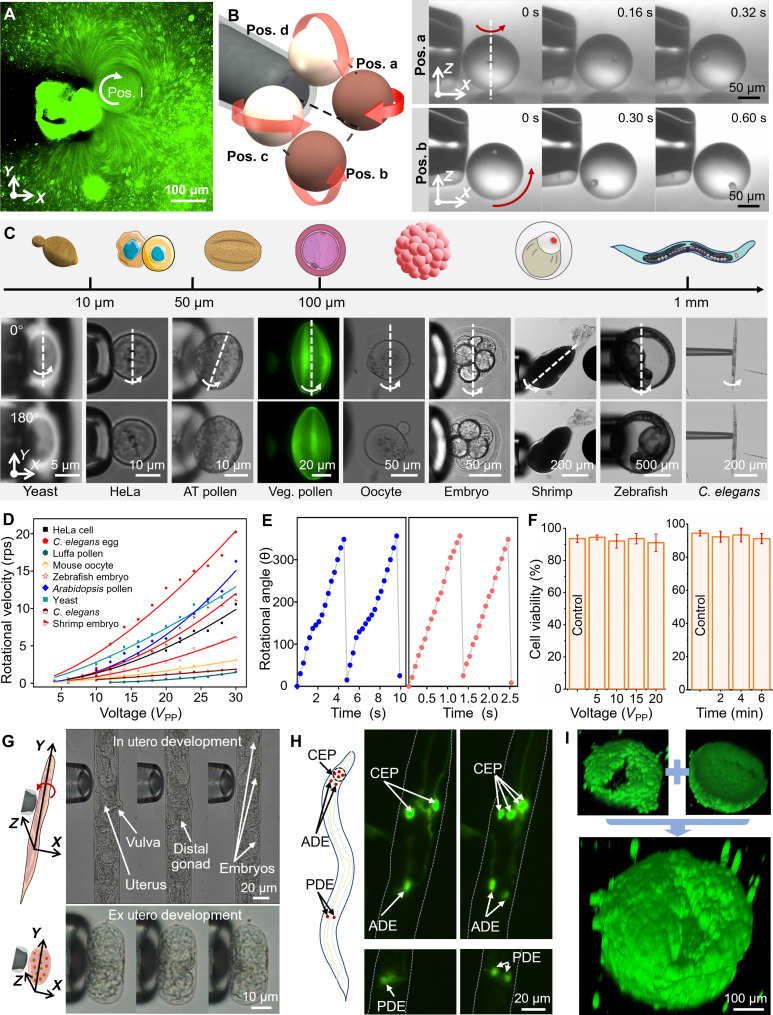
Micromanipulation is crucial for operating and analyzing microobjects in advanced biomedical applications. However, safe, low-cost, multifunctional micromanipulation for operating bio-objects across scales and modalities remains inaccessible. Here, we propose a versatile micromanipulation method driven by acoustic gas-liquid-solid interactions, named μSonic-hand. The bubble contained at the end of a micropipette and the surrounding liquid form a gas-liquid multiphase system susceptible to acoustic waves. Driven by a piezoelectric transducer, the oscillating gas-liquid interface induces acoustic microstreaming, markedly increasing the mass transfer efficiency. It enables multiple liquid micromanipulations, including mixing, dispersion, enhancing cell membrane permeability, and harvesting selected cells. Furthermore, a controllable three-dimensional axisymmetric vortex in an open environment overcomes the constraints of microfluidic chip, enabling stable trapping, rapid transportation, and multidirectional rotation of HeLa cells, embryos, and other bio-objects ranging from micrometers to millimeters. A variety of applications demonstrate that the μSonic-hand, with its wide-range capabilities, inherent biocompatibility, and extremely low cost could remarkably advance biomedical science.
微操作对于先进生物医学应用中的微物体操作和分析至关重要。然而,用于跨尺度和模态操作生物物体的安全、低成本、多功能微操作仍然难以实现。在此,我们提出一种由声气-液-固相互作用驱动的通用微操作方法,名为μSonic-hand。微量移液器末端包含的气泡与周围液体形成一个易受声波影响的气-液多相系统。在压电换能器的驱动下,振荡的气-液界面会引发声微流,显著提高传质效率。它能够实现多种液体微操作,包括混合、分散、增强细胞膜通透性以及收获选定的细胞。此外,开放环境中可控的三维轴对称涡旋克服了微流控芯片的限制,能够对HeLa细胞、胚胎以及其他从微米到毫米大小的生物物体进行稳定捕获、快速运输和多向旋转。各种应用表明,μSonic-hand凭借其广泛的能力、固有的生物相容性和极低的成本,能够显著推动生物医学科学的发展。