Ma Fubao, Zhang Ran, Zhu Bowen, Yang Xirui
Communication and Network Laboratory, Dalian University, Dalian, 116622, China.
Sci Rep. 2025 May 2;15(1):15352. doi: 10.1038/s41598-025-00341-7.
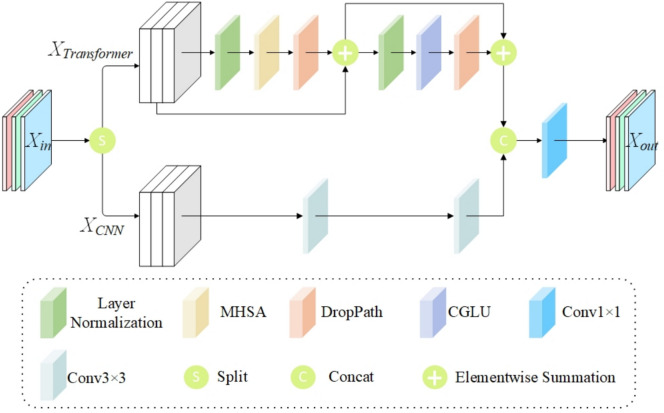
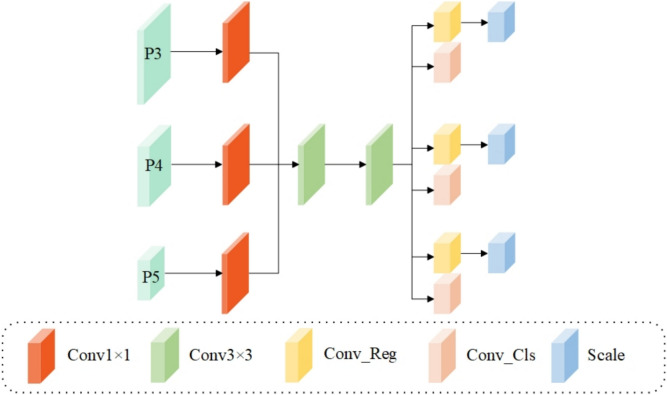
Model lightweighting and efficiency are essential in UAV target recognition. Given the limited computational resources of UAVs and the system's high stability demands, existing complex models often do not meet practical application requirements. To tackle these challenges, this paper proposes LW-YOLOv8, a lightweight object detection algorithm based on the YOLOv8s model for UAV deployment. First, Cross Stage Partial Convolutional Neural Network (CNN) Transformer Fusion Net (CSP-CTFN) is proposed. It integrates convolutional neural networks and a multi-head self-attention (MHSA) mechanism, and achieves comprehensive global feature extraction through an expanded receptive field. Second, Parameter Shared Convolution Head (PSC-Head) is designed to enhance detection efficiency and further minimize model size. Furthermore, the original loss function is replaced with SIoU to enhance detection accuracy. Extensive experiments on the VisDrone2019 dataset show that the proposed model reduces parameters by 37.9%, computational cost by 22.8%, and model size by 36.9%, while improving AP, AP50, and AP75 by 0.2%, 0.2%, and 0.4%, respectively. The results indicate that the proposed model performs effectively in UAV recognition applications.
模型轻量化和效率在无人机目标识别中至关重要。鉴于无人机有限的计算资源以及系统对高稳定性的要求,现有的复杂模型往往无法满足实际应用需求。为应对这些挑战,本文提出了LW-YOLOv8,一种基于YOLOv8s模型的用于无人机部署的轻量化目标检测算法。首先,提出了跨阶段部分卷积神经网络(CNN)变换器融合网络(CSP-CTFN)。它集成了卷积神经网络和多头自注意力(MHSA)机制,并通过扩展的感受野实现全面的全局特征提取。其次,设计了参数共享卷积头(PSC-Head)以提高检测效率并进一步最小化模型大小。此外,用SIoU替换原始损失函数以提高检测精度。在VisDrone2019数据集上进行的大量实验表明,所提出的模型参数减少了37.9%,计算成本降低了22.8%,模型大小减小了36.9%,同时AP、AP50和AP75分别提高了0.2%、0.2%和0.4%。结果表明,所提出的模型在无人机识别应用中表现有效。