Wang Xiaoyu, Chen Te, Wang Renzhong, Lu Jiankang, Dou Guowei
School of Mechanical and Electrical Engineering, Suzhou Vocational University, Suzhou 215000, China.
Robotics and Intelligent Equipment Engineering Research Center of Jiangsu Province, Suzhou Vocational University, Suzhou 215000, China.
Sensors (Basel). 2025 Jun 24;25(13):3927. doi: 10.3390/s25133927.
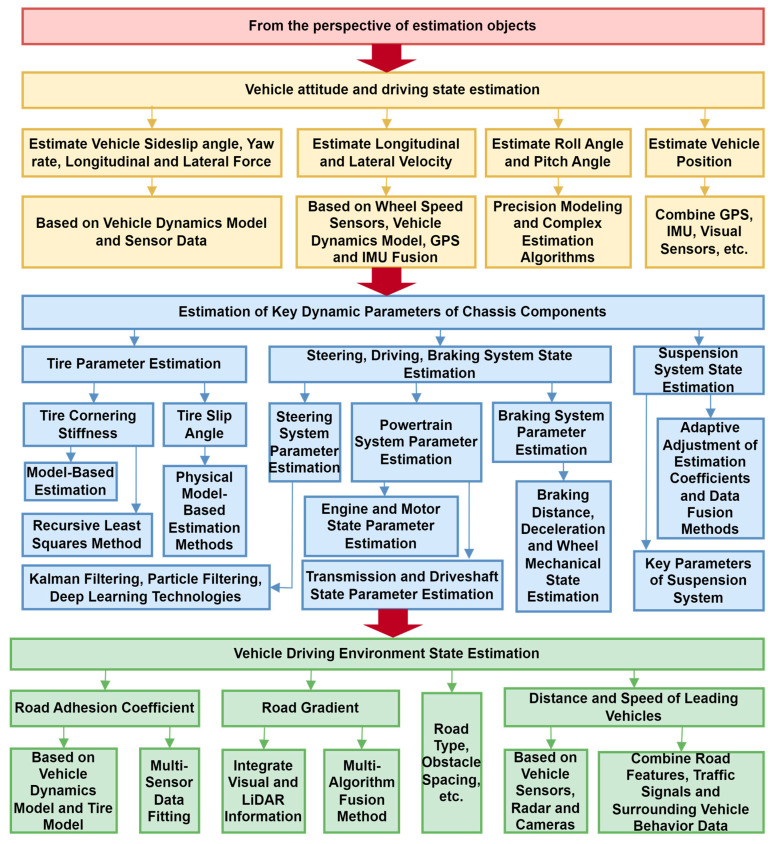
This paper reviews research on vehicle driving state estimation research. Based on the discussion of the importance, development history, and application fields of this topic of research, it focuses on analyzing vehicle state estimation techniques from different perspectives, namely (1) from the perspective of the estimation objects, including vehicle attitude and driving state estimations, chassis component key dynamic parameter estimations, and vehicle driving environment state estimations; (2) from the perspective of vehicle characteristics, including vehicle dynamics coupling characteristics, vehicle multi-source information redundancy characteristics, and vehicle state transition characteristics; (3) from the perspective of key estimation algorithms, including model-based Kalman filtering algorithms, data-driven machine learning algorithms, and optimization estimation algorithms combining mechanism-based and data-driven approaches. This manuscript helps interested readers to comprehensively understand the research progress, technical features, and future trends of vehicle state estimation technology from the perspective of overall architecture and subdomains.
本文综述了车辆行驶状态估计研究。在讨论该研究主题的重要性、发展历史和应用领域的基础上,重点从不同角度分析车辆状态估计技术,即:(1)从估计对象的角度,包括车辆姿态和行驶状态估计、底盘部件关键动态参数估计以及车辆行驶环境状态估计;(2)从车辆特性的角度,包括车辆动力学耦合特性、车辆多源信息冗余特性以及车辆状态转换特性;(3)从关键估计算法的角度,包括基于模型的卡尔曼滤波算法、数据驱动的机器学习算法以及结合基于机理和数据驱动方法的优化估计算法。本文有助于感兴趣的读者从整体架构和子领域的角度全面了解车辆状态估计技术的研究进展、技术特点和未来趋势。