The University of Queensland, Queensland Brain Institute, Brisbane, Queensland, Australia.
PLoS Comput Biol. 2012;8(8):e1002651. doi: 10.1371/journal.pcbi.1002651. Epub 2012 Aug 16.
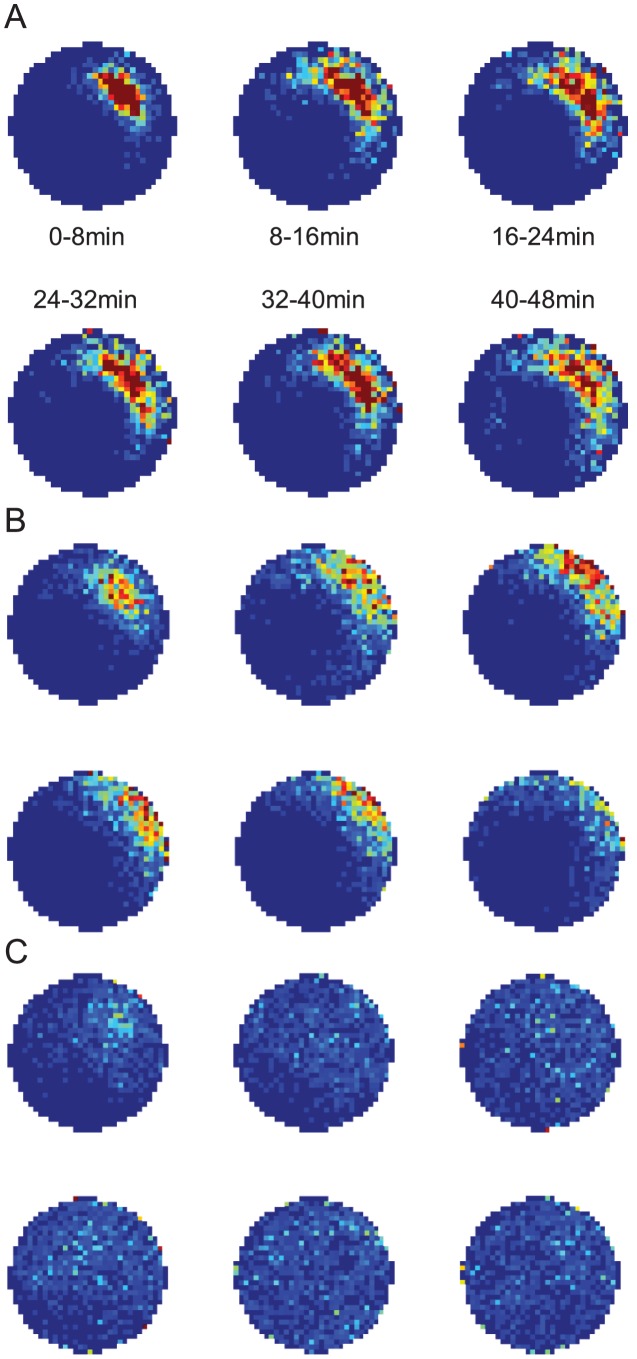
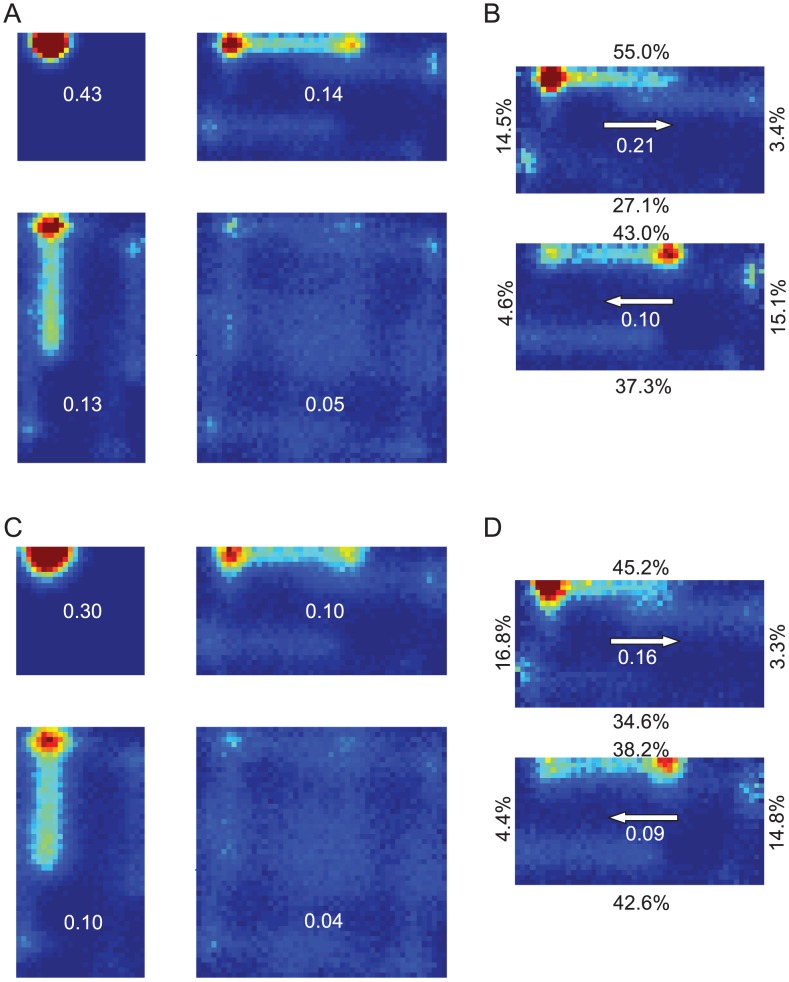
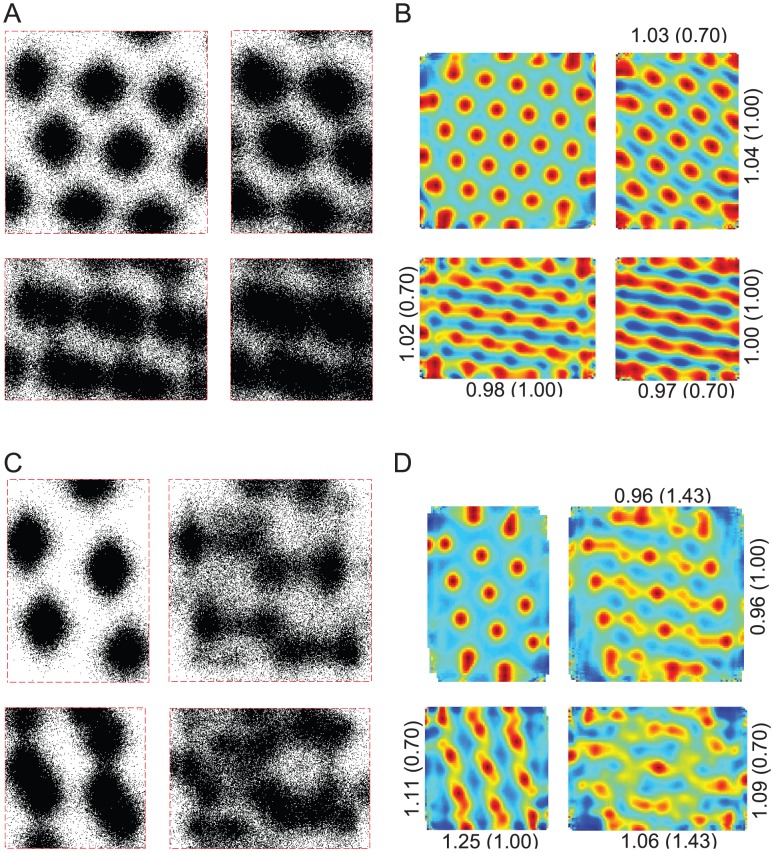
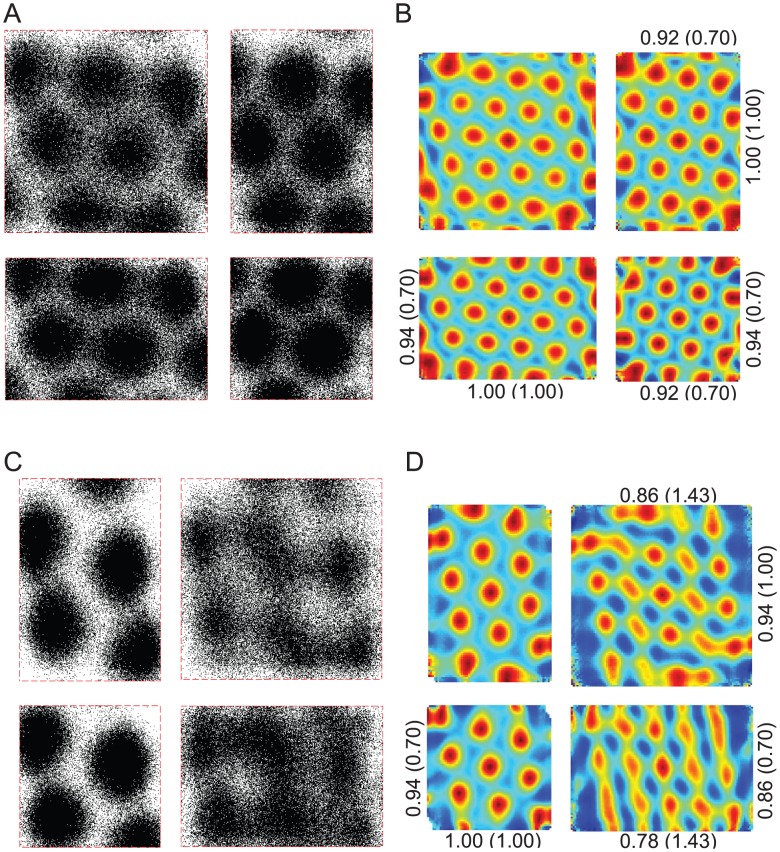
Spatial navigation requires the processing of complex, disparate and often ambiguous sensory data. The neurocomputations underpinning this vital ability remain poorly understood. Controversy remains as to whether multimodal sensory information must be combined into a unified representation, consistent with Tolman's "cognitive map", or whether differential activation of independent navigation modules suffice to explain observed navigation behaviour. Here we demonstrate that key neural correlates of spatial navigation in darkness cannot be explained if the path integration system acted independently of boundary (landmark) information. In vivo recordings demonstrate that the rodent head direction (HD) system becomes unstable within three minutes without vision. In contrast, rodents maintain stable place fields and grid fields for over half an hour without vision. Using a simple HD error model, we show analytically that idiothetic path integration (iPI) alone cannot be used to maintain any stable place representation beyond two to three minutes. We then use a measure of place stability based on information theoretic principles to prove that featureless boundaries alone cannot be used to improve localization above chance level. Having shown that neither iPI nor boundaries alone are sufficient, we then address the question of whether their combination is sufficient and--we conjecture--necessary to maintain place stability for prolonged periods without vision. We addressed this question in simulations and robot experiments using a navigation model comprising of a particle filter and boundary map. The model replicates published experimental results on place field and grid field stability without vision, and makes testable predictions including place field splitting and grid field rescaling if the true arena geometry differs from the acquired boundary map. We discuss our findings in light of current theories of animal navigation and neuronal computation, and elaborate on their implications and significance for the design, analysis and interpretation of experiments.
空间导航需要处理复杂、离散且常常模糊的感官数据。支持这一重要能力的神经计算仍然知之甚少。关于多模态感官信息是否必须组合成一个统一的表示,与托尔曼的“认知地图”一致,或者独立的导航模块的差异激活是否足以解释观察到的导航行为,仍然存在争议。在这里,我们证明如果路径整合系统独立于边界(地标)信息发挥作用,那么关键的黑暗中空间导航的神经相关物就无法得到解释。体内记录表明,在没有视觉的情况下,啮齿动物的头部方向(HD)系统在三分钟内变得不稳定。相比之下,啮齿动物在没有视觉的情况下可以保持稳定的位置场和网格场超过半小时。使用简单的 HD 误差模型,我们从分析上表明,仅靠自身的内感受路径整合(iPI)无法维持任何稳定的位置表示超过两到三分钟。然后,我们使用基于信息论原理的位置稳定性度量来证明,没有特征的边界本身不能用于将定位提高到超过随机水平。我们已经表明,iPI 或边界本身都不足以满足要求,然后我们解决了它们的组合是否足以维持长时间无视觉的位置稳定性的问题。我们通过使用粒子滤波器和边界图组成的导航模型在模拟和机器人实验中解决了这个问题。该模型复制了没有视觉的情况下位置场和网格场稳定性的已发表实验结果,并做出了可测试的预测,包括如果真实竞技场几何形状与获取的边界图不同,则位置场分裂和网格场缩放。我们根据当前动物导航和神经元计算理论讨论了我们的发现,并详细说明了它们对实验设计、分析和解释的意义和意义。