Queensland Brain Institute, The University of Queensland, Brisbane, Queensland, Australia.
PLoS One. 2011;6(10):e25687. doi: 10.1371/journal.pone.0025687. Epub 2011 Oct 4.
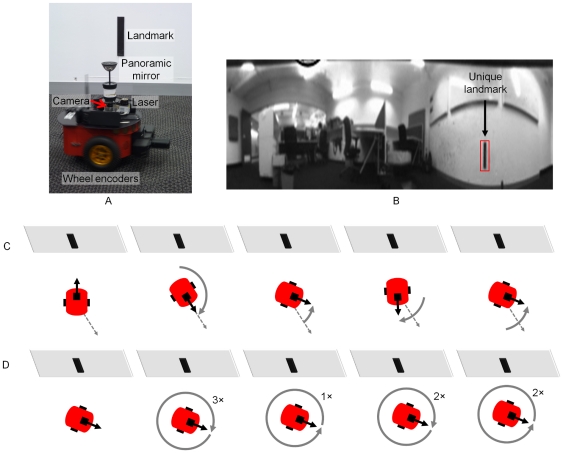
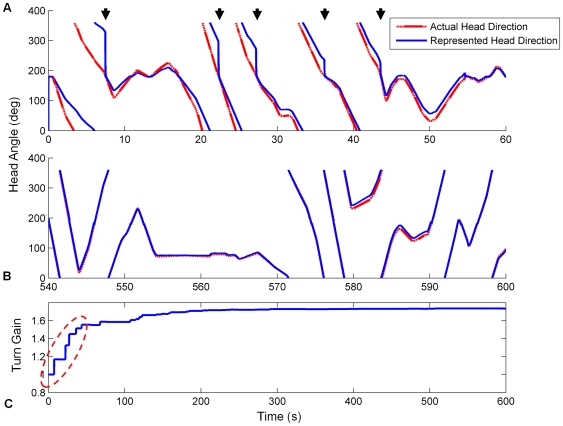
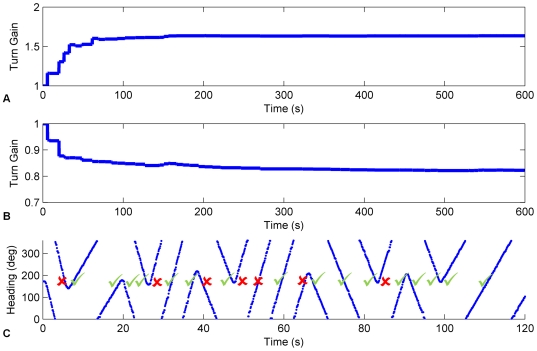
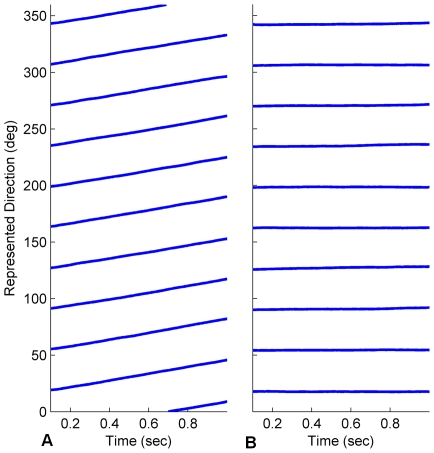
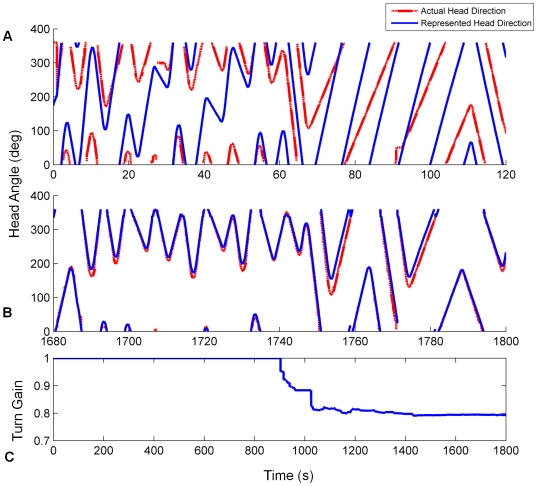
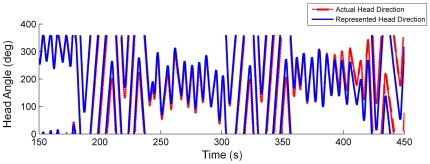
The head direction (HD) system in mammals contains neurons that fire to represent the direction the animal is facing in its environment. The ability of these cells to reliably track head direction even after the removal of external sensory cues implies that the HD system is calibrated to function effectively using just internal (proprioceptive and vestibular) inputs. Rat pups and other infant mammals display stereotypical warm-up movements prior to locomotion in novel environments, and similar warm-up movements are seen in adult mammals with certain brain lesion-induced motor impairments. In this study we propose that synaptic learning mechanisms, in conjunction with appropriate movement strategies based on warm-up movements, can calibrate the HD system so that it functions effectively even in darkness. To examine the link between physical embodiment and neural control, and to determine that the system is robust to real-world phenomena, we implemented the synaptic mechanisms in a spiking neural network and tested it on a mobile robot platform. Results show that the combination of the synaptic learning mechanisms and warm-up movements are able to reliably calibrate the HD system so that it accurately tracks real-world head direction, and that calibration breaks down in systematic ways if certain movements are omitted. This work confirms that targeted, embodied behaviour can be used to calibrate neural systems, demonstrates that 'grounding' of modelled biological processes in the real world can reveal underlying functional principles (supporting the importance of robotics to biology), and proposes a functional role for stereotypical behaviours seen in infant mammals and those animals with certain motor deficits. We conjecture that these calibration principles may extend to the calibration of other neural systems involved in motion tracking and the representation of space, such as grid cells in entorhinal cortex.
哺乳动物的头部方向 (HD) 系统包含神经元,这些神经元会在动物面向环境中的某个方向时发射信号。这些细胞即使在去除外部感觉提示后仍能可靠地跟踪头部方向,这意味着 HD 系统仅使用内部(本体感觉和前庭)输入就能有效地校准。鼠仔和其他幼年哺乳动物在新环境中运动前会表现出刻板的热身运动,而具有某些因大脑损伤引起的运动障碍的成年哺乳动物也会出现类似的热身运动。在这项研究中,我们提出,突触学习机制与基于热身运动的适当运动策略相结合,可以校准 HD 系统,使其即使在黑暗中也能有效地运行。为了研究物理体现与神经控制之间的联系,并确定该系统对真实世界现象具有鲁棒性,我们在一个尖峰神经网络中实现了突触机制,并在移动机器人平台上对其进行了测试。结果表明,突触学习机制和热身运动的结合能够可靠地校准 HD 系统,使其能够准确跟踪真实世界的头部方向,如果省略某些运动,校准会以系统的方式失效。这项工作证实了有针对性的、体现的行为可以用于校准神经系统,表明在真实世界中对建模生物过程进行“基础化”可以揭示潜在的功能原理(支持机器人技术对生物学的重要性),并为在幼年哺乳动物和某些运动缺陷动物中看到的刻板行为提出了一个功能作用。我们推测,这些校准原则可能会扩展到涉及运动跟踪和空间表示的其他神经系统的校准,例如内嗅皮层中的网格细胞。