Faculty of Electrical Engineering, University of Ljubljana, Tržaška 25, Ljubljana 1000, Slovenia.
The BioRobotics Institute, Scuola Superiore Sant'Anna, viale Rinaldo Piaggio 34, Pontedera 56025, Pisa, Italy.
Sensors (Basel). 2014 Feb 11;14(2):2776-94. doi: 10.3390/s140202776.
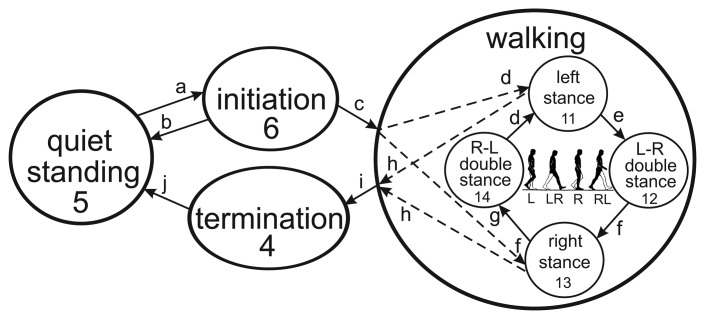
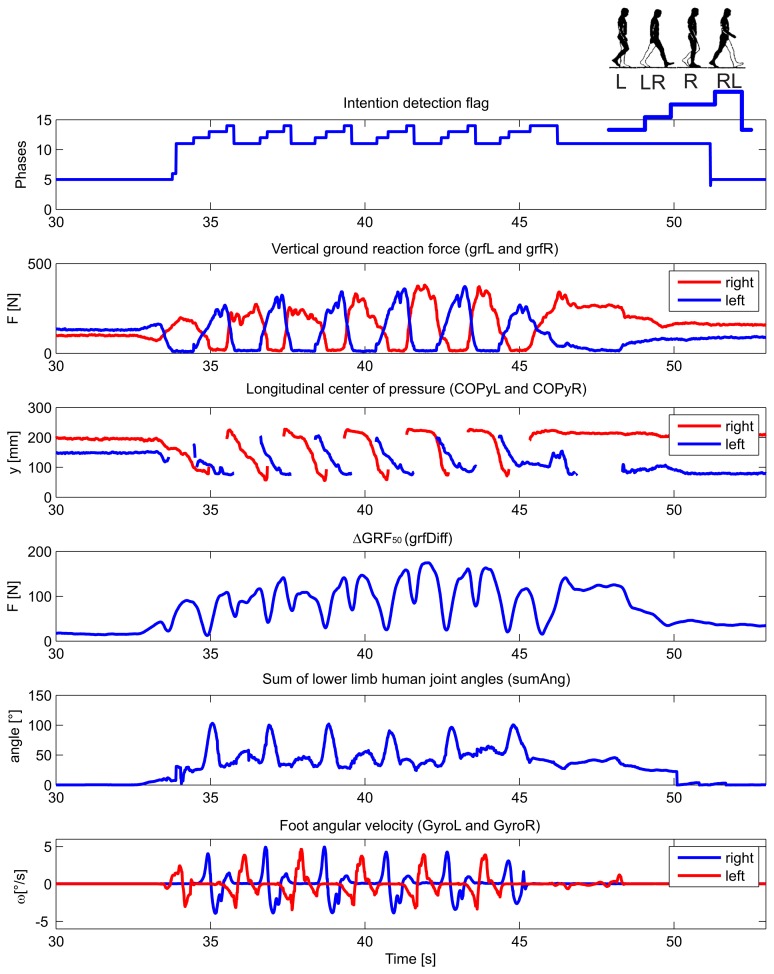
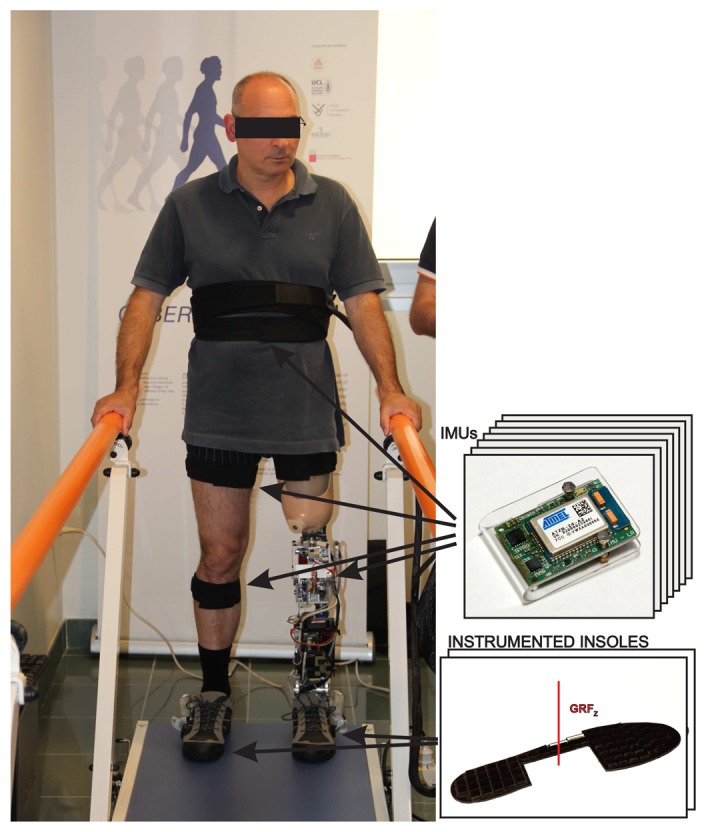
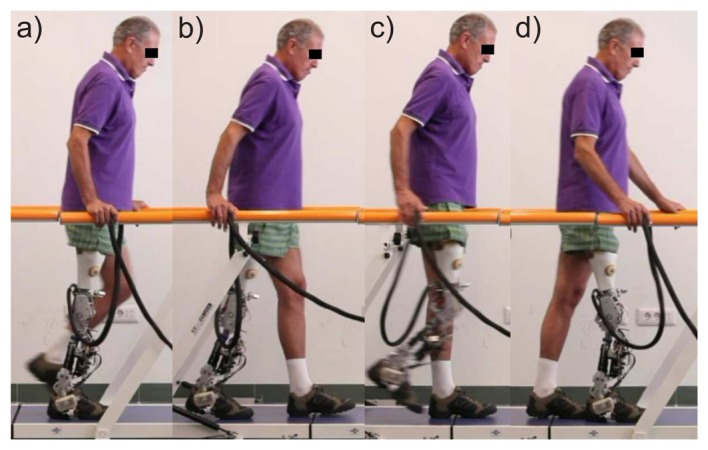
This paper presents a gait phase detection algorithm for providing feedback in walking with a robotic prosthesis. The algorithm utilizes the output signals of a wearable wireless sensory system incorporating sensorized shoe insoles and inertial measurement units attached to body segments. The principle of detecting transitions between gait phases is based on heuristic threshold rules, dividing a steady-state walking stride into four phases. For the evaluation of the algorithm, experiments with three amputees, walking with the robotic prosthesis and wearable sensors, were performed. Results show a high rate of successful detection for all four phases (the average success rate across all subjects >90%). A comparison of the proposed method to an off-line trained algorithm using hidden Markov models reveals a similar performance achieved without the need for learning dataset acquisition and previous model training.
本文提出了一种用于为机器人假肢行走提供反馈的步态相位检测算法。该算法利用了一种可穿戴无线传感器系统的输出信号,该系统包括带有传感器的鞋垫和附在身体部位上的惯性测量单元。检测步态相位转换的原理基于启发式阈值规则,将稳态行走步划分为四个阶段。为了评估该算法,对使用机器人假肢和可穿戴传感器行走的三名截肢者进行了实验。结果表明,所有四个阶段的检测成功率都很高(所有受试者的平均成功率>90%)。将所提出的方法与使用隐马尔可夫模型的离线训练算法进行比较,结果表明,在不需要学习数据集采集和先前模型训练的情况下,可以获得相似的性能。