Nasseroleslami Bahman, Hasson Christopher J, Sternad Dagmar
Department of Biology, Northeastern University, Boston, Massachusetts, United States of America.
Department of Physical Therapy, Movement and Rehabilitation Sciences, Northeastern University, Boston, Massachusetts, United States of America.
PLoS Comput Biol. 2014 Oct 23;10(10):e1003900. doi: 10.1371/journal.pcbi.1003900. eCollection 2014 Oct.
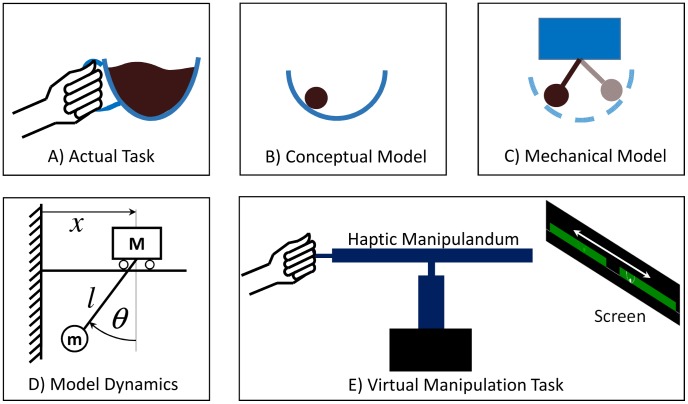
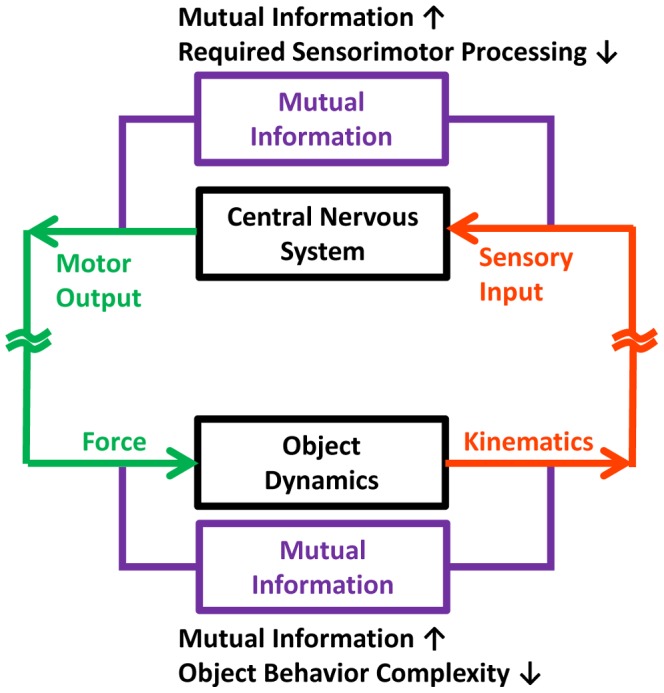
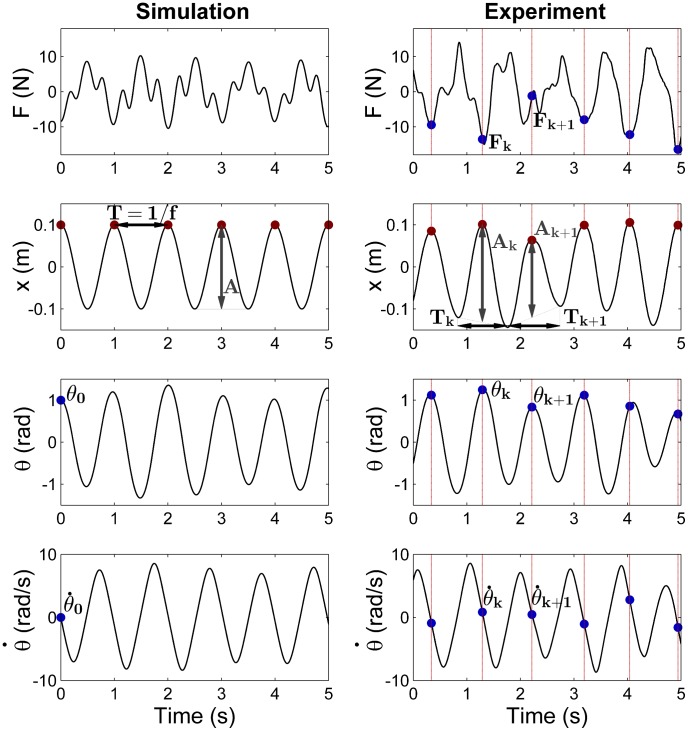
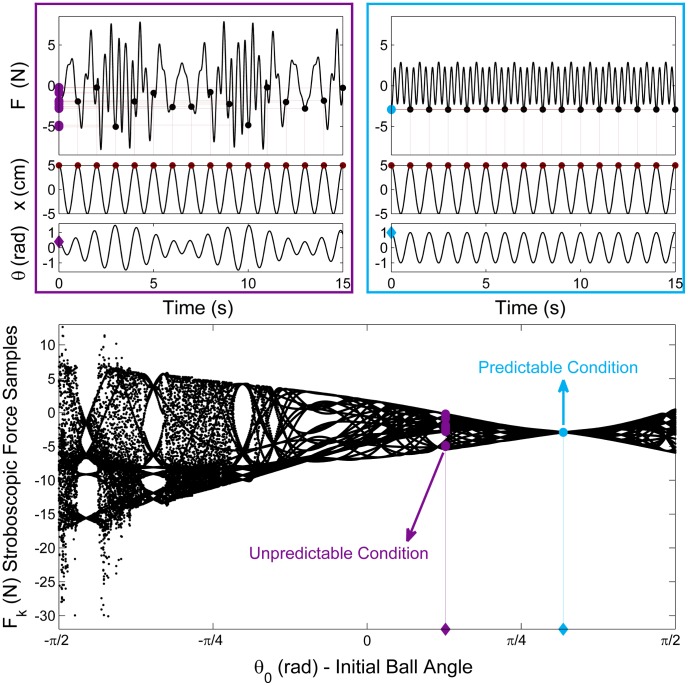
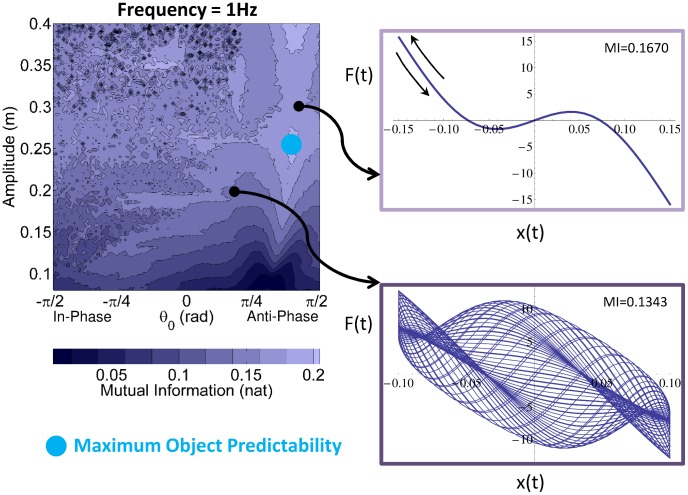
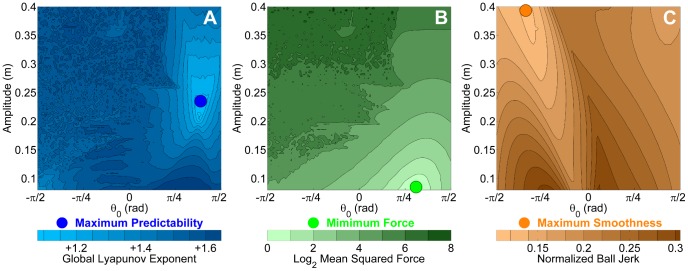
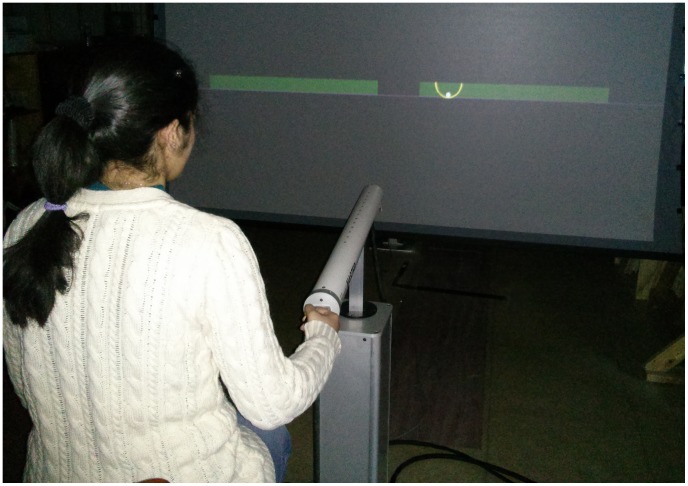
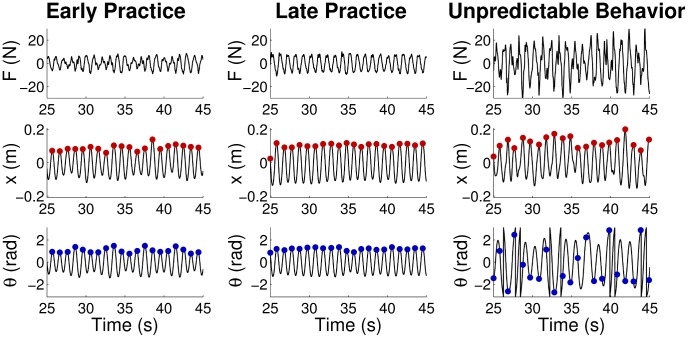
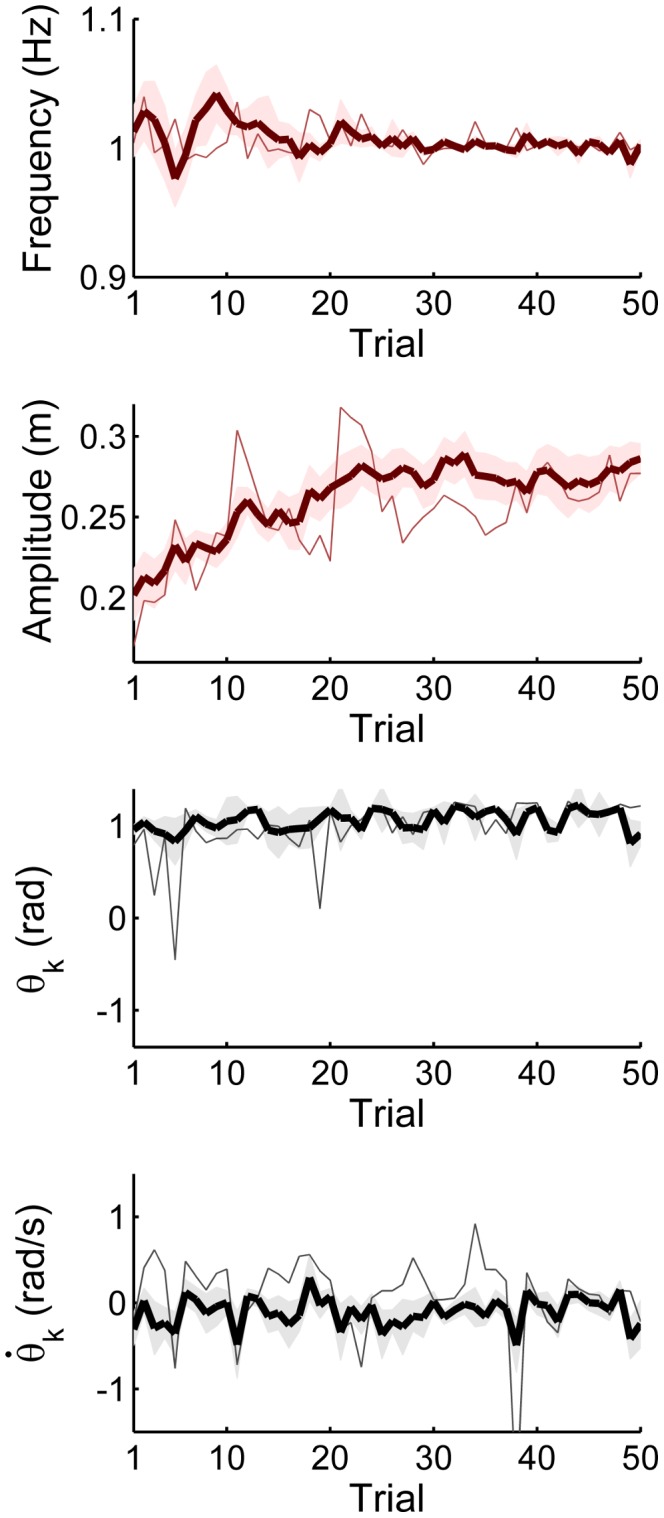
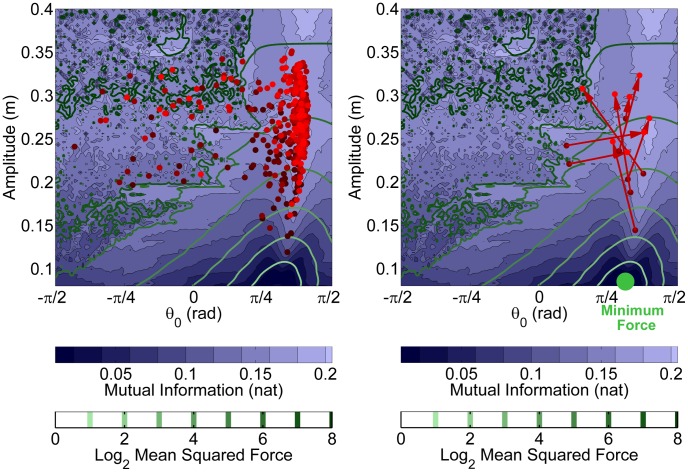
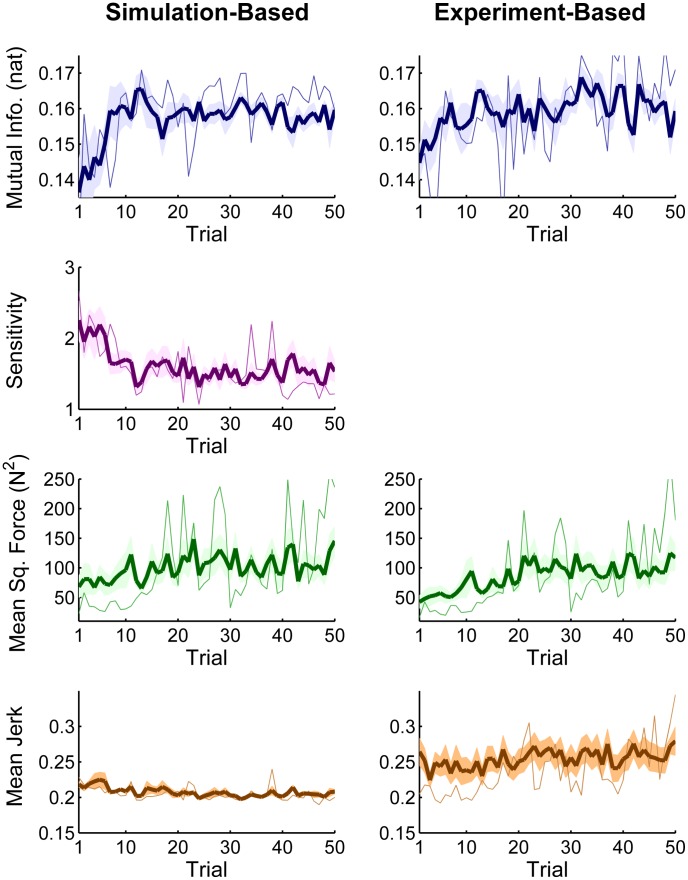
The study of object manipulation has been largely confined to discrete tasks, where accuracy, mechanical effort, or smoothness were examined to explain subjects' preferred movements. This study investigated a rhythmic manipulation task, which involved continuous interaction with a nonlinear object that led to unpredictable object behavior. Using a simplified virtual version of the task of carrying a cup of coffee, we studied how this unpredictable object behavior affected the selected strategies. The experiment was conducted in a virtual set-up, where subjects moved a cup with a ball inside, modeled by cart-and-pendulum dynamics. Inverse dynamics calculations of the system showed that performing the task with different amplitudes and relative phases required different force profiles and rendered the object's dynamics with different degrees of predictability (quantified by Mutual Information between the applied force and the cup kinematics and its sensitivity). Subjects (n = 8) oscillated the virtual cup between two targets via a robotic manipulandum, paced by a metronome at 1 Hz for 50 trials, each lasting 45 s. They were free to choose their movement amplitude and relative phase between the ball and cup. Experimental results showed that subjects increased their movement amplitudes, which rendered the interactions with the object more predictable and with lower sensitivity to the execution variables. These solutions were associated with higher average exerted force and lower object smoothness, contradicting common expectations from studies on discrete object manipulation and unrestrained movements. Instead, the findings showed that humans selected strategies with higher predictability of interaction dynamics. This finding expressed that humans seek movement strategies where force and kinematics synchronize to repeatable patterns that may require less sensorimotor information processing.
物体操纵的研究主要局限于离散任务,在这些任务中,通过检查准确性、机械作用力或流畅性来解释受试者偏好的动作。本研究调查了一种节奏性操纵任务,该任务涉及与一个非线性物体持续相互作用,这导致物体行为不可预测。我们使用携带一杯咖啡任务的简化虚拟版本,研究了这种不可预测的物体行为如何影响所选策略。实验在虚拟环境中进行,受试者移动一个里面有球的杯子,该杯子由推车 - 摆动力学模型模拟。系统的逆动力学计算表明,以不同幅度和相对相位执行任务需要不同的力分布,并使物体动力学具有不同程度的可预测性(通过作用力与杯子运动学之间的互信息及其敏感性来量化)。受试者(n = 8)通过机器人操作器在两个目标之间摆动虚拟杯子,由节拍器以1 Hz的频率 pacing 进行50次试验,每次持续45秒。他们可以自由选择运动幅度以及球和杯子之间的相对相位。实验结果表明,受试者增加了他们的运动幅度,这使得与物体的相互作用更具可预测性,并且对执行变量的敏感性更低。这些解决方案与更高的平均作用力和更低的物体流畅性相关,这与离散物体操纵和无约束运动研究的普遍预期相矛盾。相反,研究结果表明,人类选择了具有更高相互作用动力学可预测性的策略。这一发现表明,人类寻求力和运动学与可重复模式同步的运动策略,这可能需要较少的感觉运动信息处理。