Nakajima Kohei, Hauser Helmut, Li Tao, Pfeifer Rolf
The Hakubi Center for Advanced Research &Graduate School of Informatics, Kyoto University, 606-8501 Kyoto, Japan.
Department of Engineering Mathematics, University of Bristol, Bristol BS8 1UB, United Kingdom.
Sci Rep. 2015 May 27;5:10487. doi: 10.1038/srep10487.
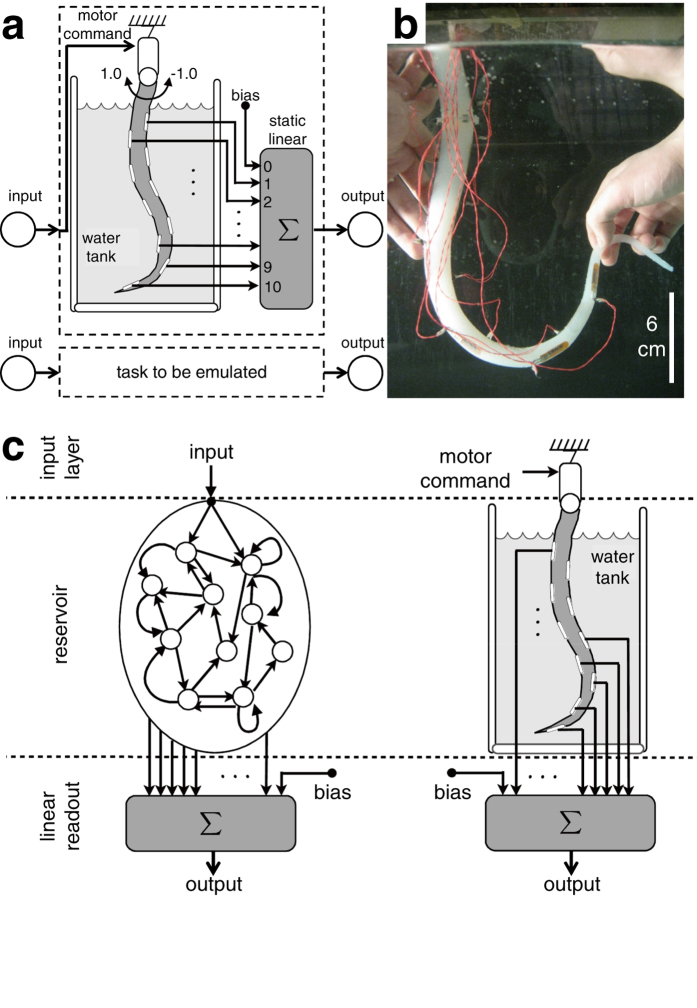
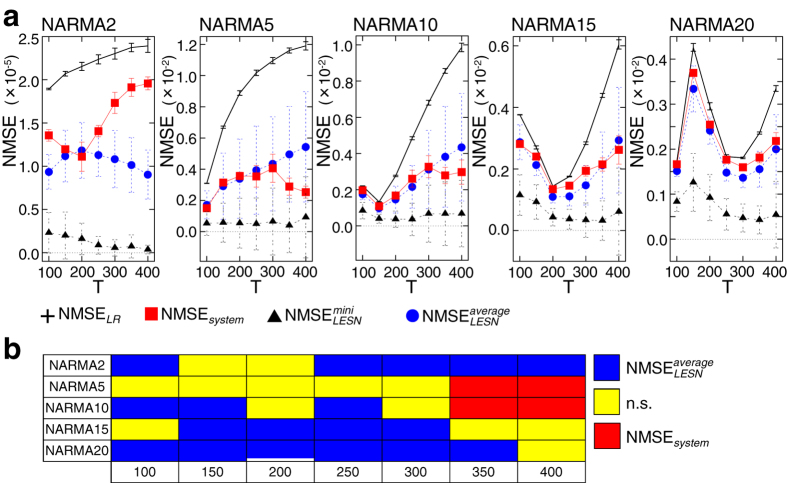
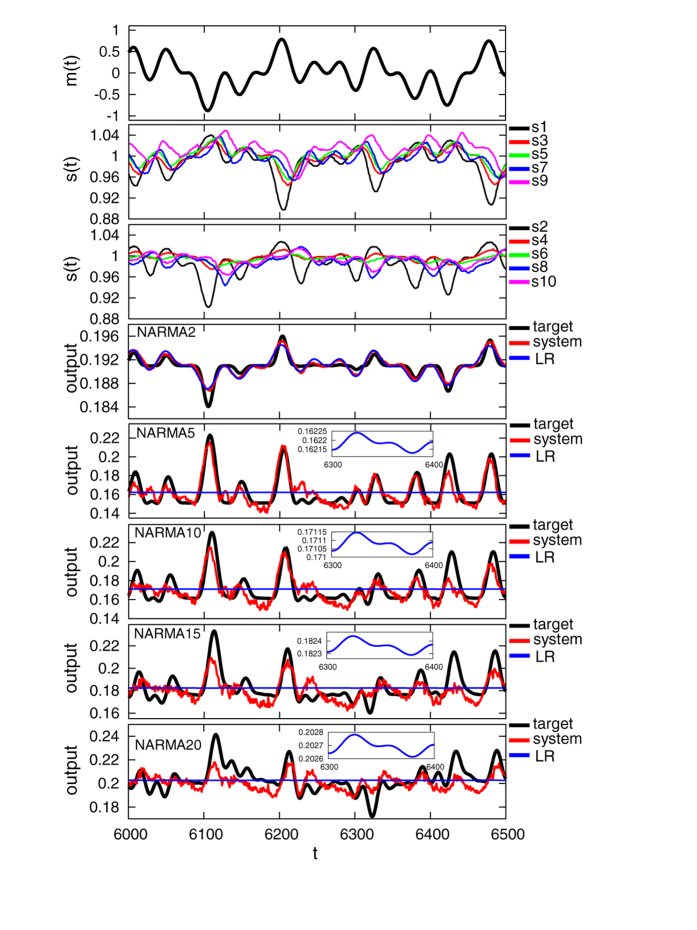
Soft machines have recently gained prominence due to their inherent softness and the resulting safety and resilience in applications. However, these machines also have disadvantages, as they respond with complex body dynamics when stimulated. These dynamics exhibit a variety of properties, including nonlinearity, memory, and potentially infinitely many degrees of freedom, which are often difficult to control. Here, we demonstrate that these seemingly undesirable properties can in fact be assets that can be exploited for real-time computation. Using body dynamics generated from a soft silicone arm, we show that they can be employed to emulate desired nonlinear dynamical systems. First, by using benchmark tasks, we demonstrate that the nonlinearity and memory within the body dynamics can increase the computational performance. Second, we characterize our system's computational capability by comparing its task performance with a standard machine learning technique and identify its range of validity and limitation. Our results suggest that soft bodies are not only impressive in their deformability and flexibility but can also be potentially used as computational resources on top and for free.
软机器最近因其固有的柔软性以及由此在应用中产生的安全性和弹性而备受关注。然而,这些机器也有缺点,因为它们在受到刺激时会以复杂的身体动力学做出反应。这些动力学表现出多种特性,包括非线性、记忆以及可能无限多的自由度,这些特性往往难以控制。在这里,我们证明这些看似不良的特性实际上可以成为可用于实时计算的资产。利用软硅树脂手臂产生的身体动力学,我们表明它们可用于模拟所需的非线性动力系统。首先,通过使用基准任务,我们证明身体动力学中的非线性和记忆可以提高计算性能。其次,我们通过将系统的任务性能与标准机器学习技术进行比较来表征我们系统的计算能力,并确定其有效性和局限性范围。我们的结果表明,软体不仅在其可变形性和灵活性方面令人印象深刻,而且还可以潜在地用作额外的免费计算资源。