Clotet Eduard, Martínez Dani, Moreno Javier, Tresanchez Marcel, Palacín Jordi
Department of Computer Science and Industrial Engineering, Universitat de Lleida, Jaume II, 69, 25001 Lleida, Spain.
Sensors (Basel). 2016 Apr 28;16(5):610. doi: 10.3390/s16050610.
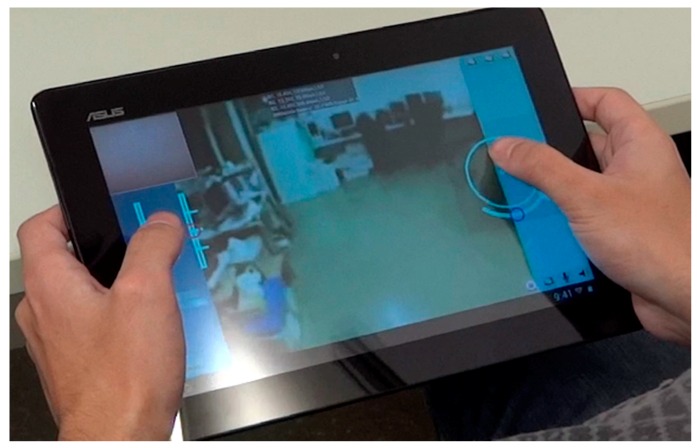
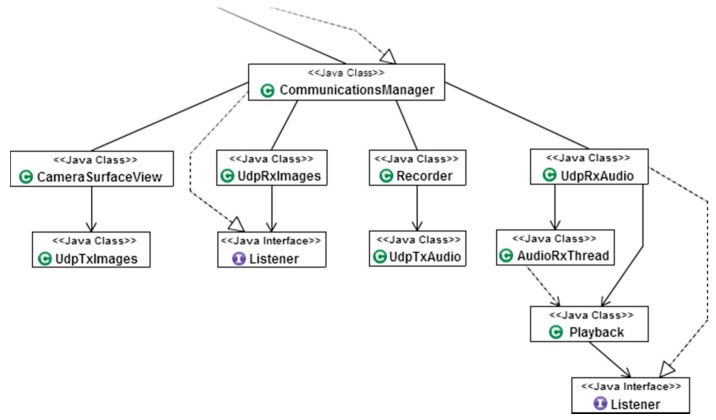
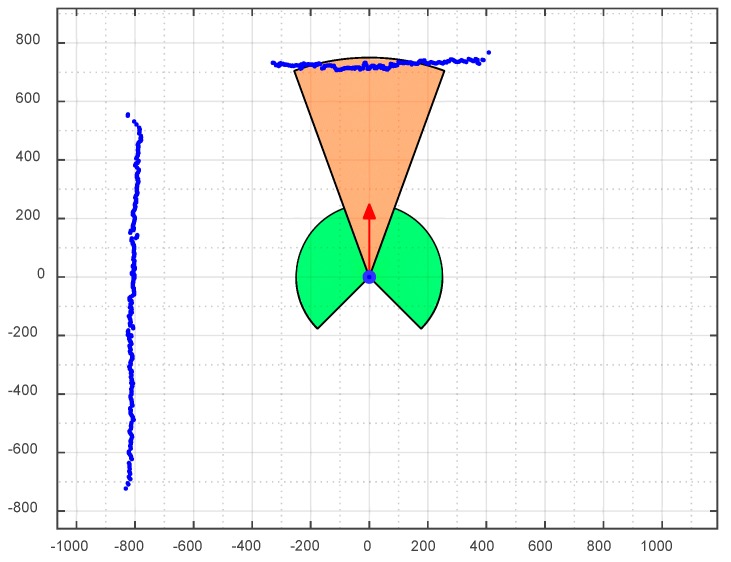
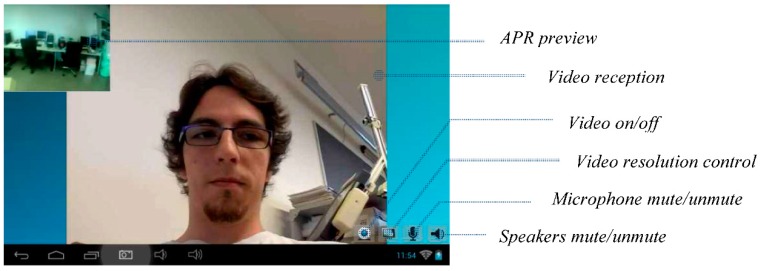
This paper presents the technical description, mechanical design, electronic components, software implementation and possible applications of a tele-operated mobile robot designed as an assisted living tool. This robotic concept has been named Assistant Personal Robot (or APR for short) and has been designed as a remotely telecontrolled robotic platform built to provide social and assistive services to elderly people and those with impaired mobility. The APR features a fast high-mobility motion system adapted for tele-operation in plain indoor areas, which incorporates a high-priority collision avoidance procedure. This paper presents the mechanical architecture, electrical fundaments and software implementation required in order to develop the main functionalities of an assistive robot. The APR uses a tablet in order to implement the basic peer-to-peer videoconference and tele-operation control combined with a tactile graphic user interface. The paper also presents the development of some applications proposed in the framework of an assisted living robot.
本文介绍了一款设计为辅助生活工具的远程操作移动机器人的技术描述、机械设计、电子元件、软件实现及可能的应用。这个机器人概念被命名为辅助个人机器人(简称APR),它被设计成一个远程遥控的机器人平台,旨在为老年人和行动不便者提供社交和辅助服务。APR具有一个快速的高机动性运动系统,适用于室内平坦区域的远程操作,该系统包含一个高优先级的避碰程序。本文介绍了开发辅助机器人主要功能所需的机械架构、电气基础和软件实现。APR使用平板电脑来实现基本的点对点视频会议和远程操作控制,并结合了触觉图形用户界面。本文还介绍了在辅助生活机器人框架内提出的一些应用的开发情况。