Zhang Yu, Teng Poching, Shimizu Yo, Hosoi Fumiki, Omasa Kenji
Graduate School of Agricultural and Life Sciences, The University of Tokyo, 1-1-1, Yayoi, Bunkyo-ku, Tokyo 113-8657, Japan.
Sensors (Basel). 2016 Jun 14;16(6):874. doi: 10.3390/s16060874.
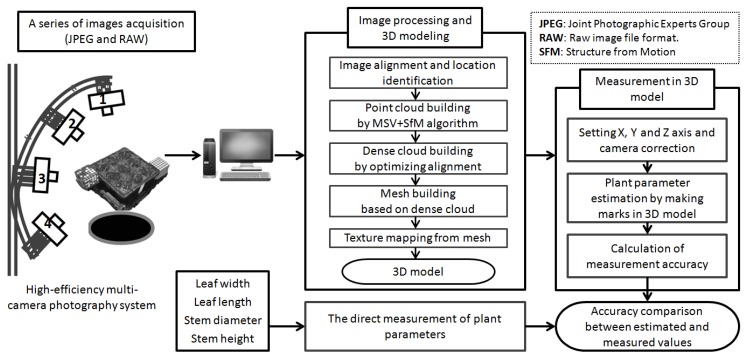
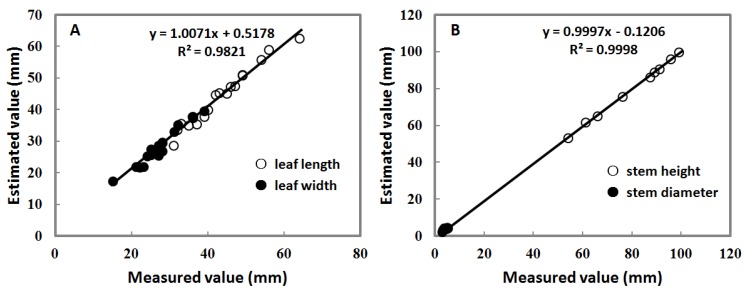
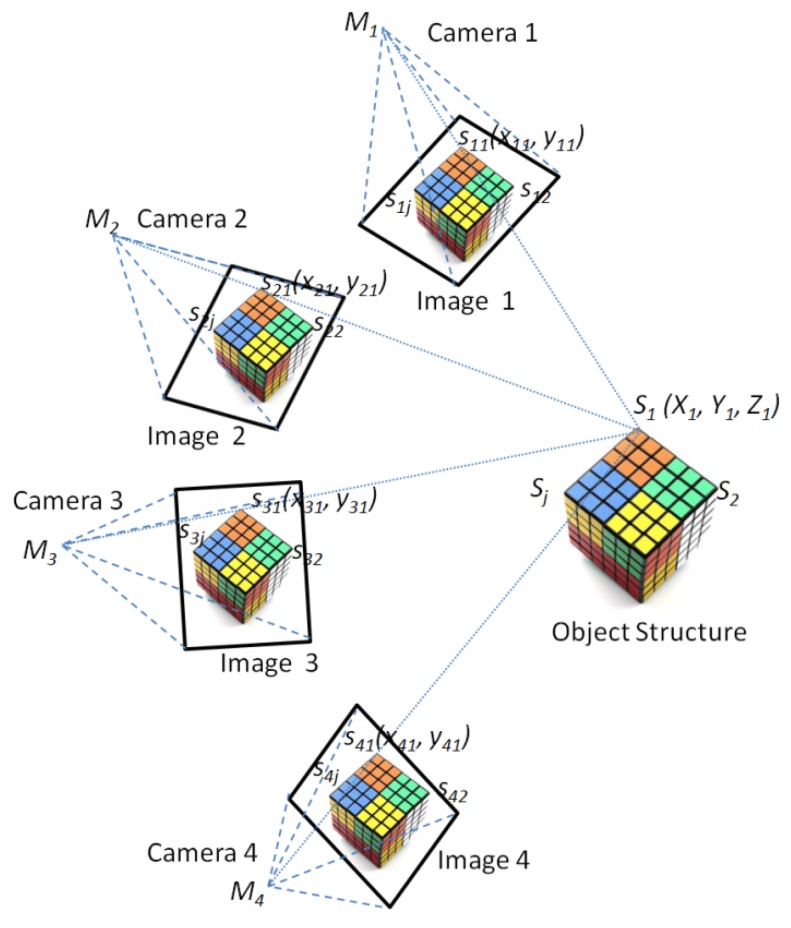
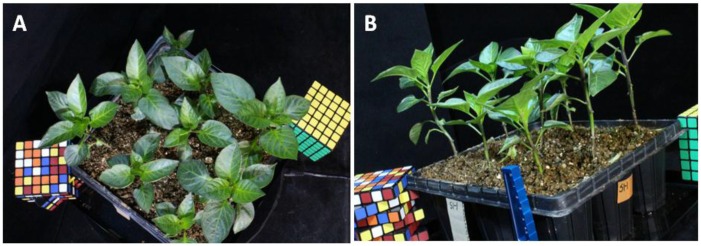
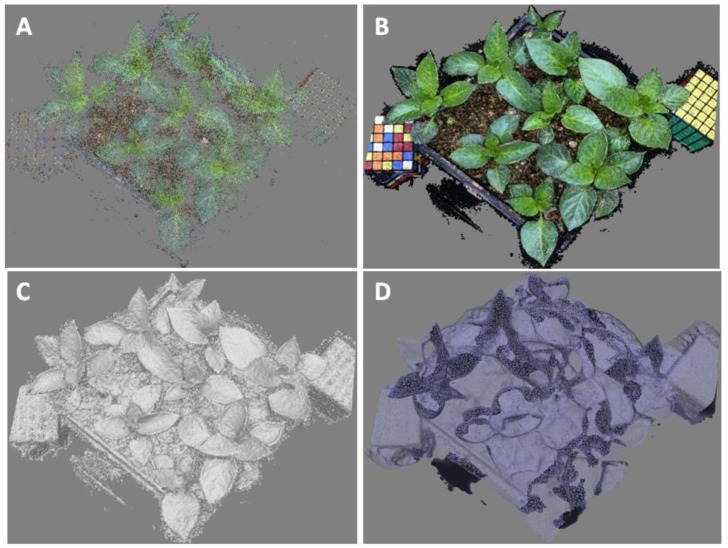
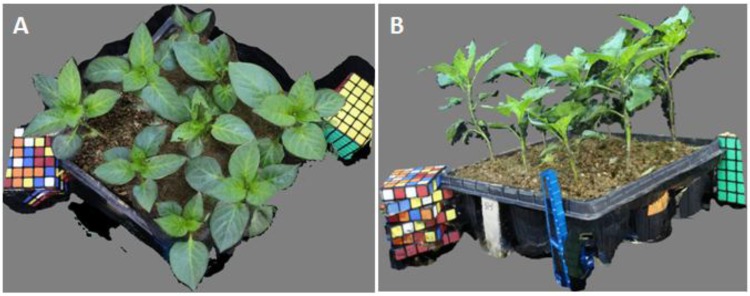
For plant breeding and growth monitoring, accurate measurements of plant structure parameters are very crucial. We have, therefore, developed a high efficiency Multi-Camera Photography (MCP) system combining Multi-View Stereovision (MVS) with the Structure from Motion (SfM) algorithm. In this paper, we measured six variables of nursery paprika plants and investigated the accuracy of 3D models reconstructed from photos taken by four lens types at four different positions. The results demonstrated that error between the estimated and measured values was small, and the root-mean-square errors (RMSE) for leaf width/length and stem height/diameter were 1.65 mm (R² = 0.98) and 0.57 mm (R² = 0.99), respectively. The accuracies of the 3D model reconstruction of leaf and stem by a 28-mm lens at the first and third camera positions were the highest, and the number of reconstructed fine-scale 3D model shape surfaces of leaf and stem is the most. The results confirmed the practicability of our new method for the reconstruction of fine-scale plant model and accurate estimation of the plant parameters. They also displayed that our system is a good system for capturing high-resolution 3D images of nursery plants with high efficiency.
对于植物育种和生长监测而言,准确测量植物结构参数至关重要。因此,我们开发了一种高效的多相机摄影(MCP)系统,该系统将多视图立体视觉(MVS)与运动结构(SfM)算法相结合。在本文中,我们测量了育苗期辣椒植株的六个变量,并研究了从四种不同位置的四种镜头类型拍摄的照片重建的三维模型的准确性。结果表明,估计值与测量值之间的误差很小,叶宽/叶长和茎高/茎直径的均方根误差(RMSE)分别为1.65毫米(R² = 0.98)和0.57毫米(R² = 0.99)。在第一和第三个相机位置使用28毫米镜头重建叶片和茎的三维模型的精度最高,并且重建的叶片和茎的精细尺度三维模型形状表面的数量最多。结果证实了我们用于重建精细尺度植物模型和准确估计植物参数的新方法的实用性。它们还表明,我们的系统是一个能够高效捕获育苗植物高分辨率三维图像的良好系统。