Decker Ryan S, Shademan Azad, Opfermann Justin D, Leonard Simon, Kim Peter C W, Krieger Axel
IEEE Trans Biomed Eng. 2017 Mar;64(3):549-556. doi: 10.1109/TBME.2017.2656803. Epub 2017 Jan 23.
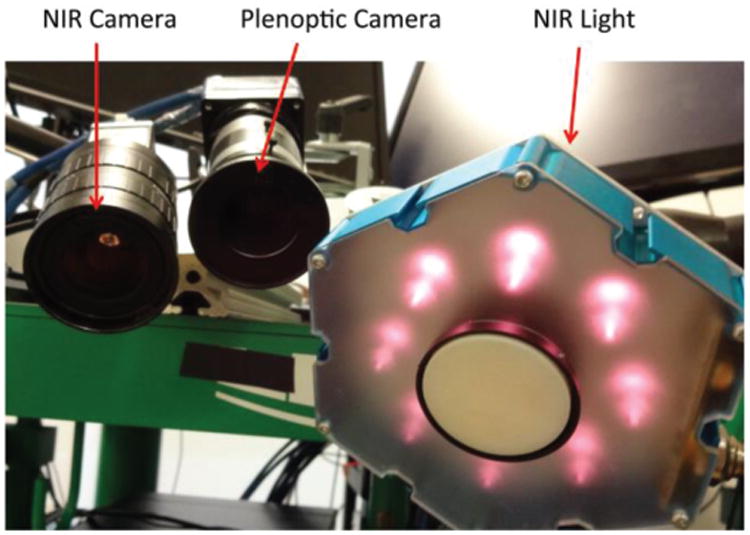
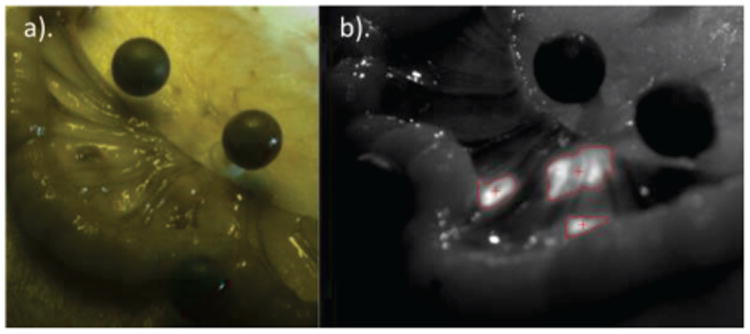
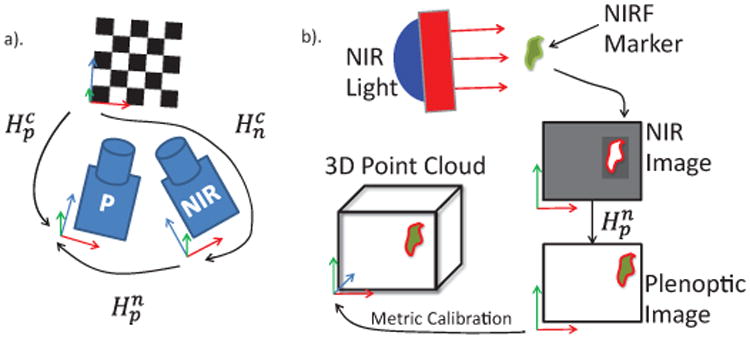
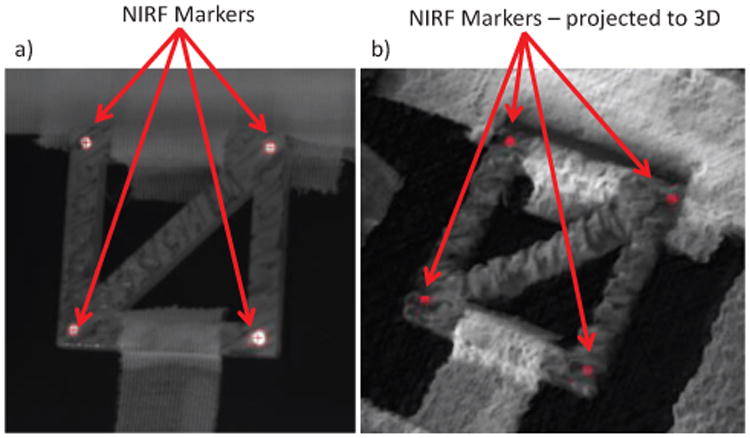
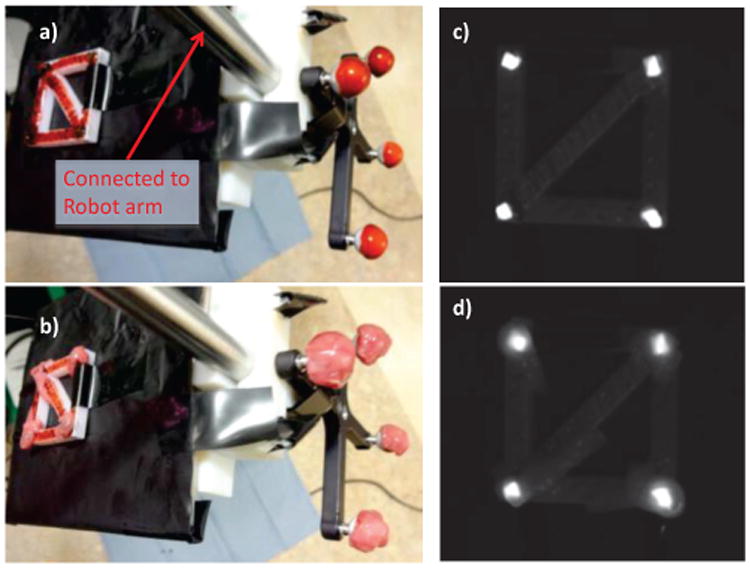
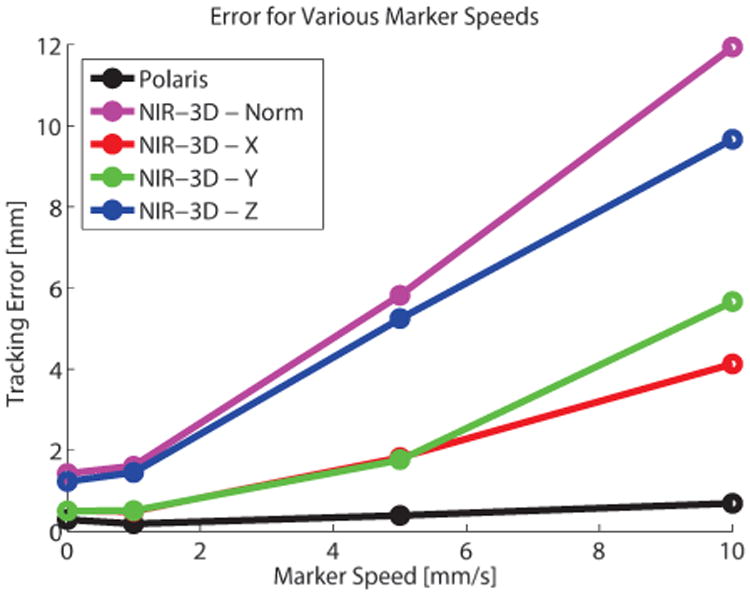
A fundamental challenge in soft-tissue surgery is that target tissue moves and deforms, becomes occluded by blood or other tissue, and is difficult to differentiate from surrounding tissue. We developed small biocompatible near-infrared fluorescent (NIRF) markers with a novel fused plenoptic and NIR camera tracking system, enabling three-dimensional tracking of tools and target tissue while overcoming blood and tissue occlusion in the uncontrolled, rapidly changing surgical environment. In this work, we present the tracking system and marker design and compare tracking accuracies to standard optical tracking methods using robotic experiments. At speeds of 1 mm/s, we observe tracking accuracies of 1.61 mm, degrading only to 1.71 mm when the markers are covered in blood and tissue.
软组织手术中的一个基本挑战是目标组织会移动和变形,被血液或其他组织遮挡,并且难以与周围组织区分开来。我们开发了具有新型融合全光和近红外相机跟踪系统的小型生物相容性近红外荧光(NIRF)标记物,能够在不受控制、快速变化的手术环境中克服血液和组织遮挡的同时,对工具和目标组织进行三维跟踪。在这项工作中,我们展示了跟踪系统和标记物设计,并通过机器人实验将跟踪精度与标准光学跟踪方法进行比较。在1毫米/秒的速度下,我们观察到跟踪精度为1.61毫米,当标记物被血液和组织覆盖时,精度仅降至1.71毫米。