Moore Talia Y, Rivera Alberto M, Biewener Andrew A
Concord Field Station, Harvard University, 100 Old Causeway Road, Bedford, MA 01730 USA.
University of Michigan, Museum of Zoology and Department of Ecology and Evolutionary Biology, Ruthven Museum, 1109 Geddes Ave, Ann Arbor, MI 48109 USA.
Front Zool. 2017 Jul 3;14:32. doi: 10.1186/s12983-017-0215-z. eCollection 2017.
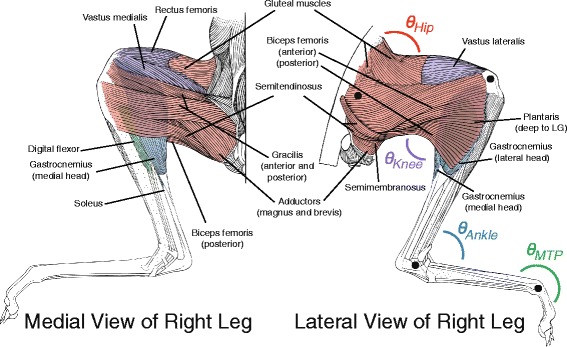
Numerous historical descriptions of the Lesser Egyptian jerboa, , a small bipedal mammal with elongate hindlimbs, make special note of their extraordinary leaping ability. We observed jerboa locomotion in a laboratory setting and performed inverse dynamics analysis to understand how this small rodent generates such impressive leaps. We combined kinematic data from video, kinetic data from a force platform, and morphometric data from dissections to calculate the relative contributions of each hindlimb muscle and tendon to the total movement.
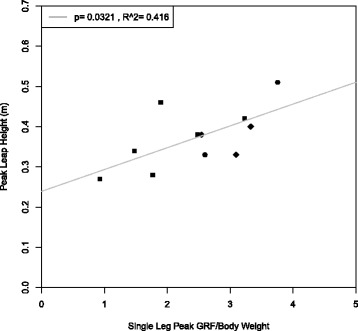
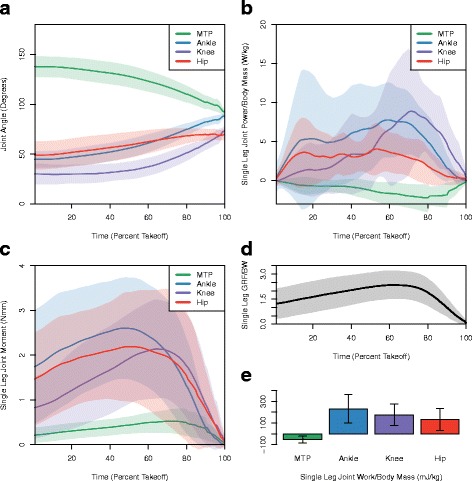
Jerboas leapt in excess of 10 times their hip height. At the maximum recorded leap height (not the maximum observed leap height), peak moments for metatarso-phalangeal, ankle, knee, and hip joints were 13.1, 58.4, 65.1, and 66.9 Nmm, respectively. Muscles acting at the ankle joint contributed the most work (mean 231.6 mJ / kg Body Mass) to produce the energy of vertical leaping, while muscles acting at the metatarso-phalangeal joint produced the most stress (peak 317.1 kPa). The plantaris, digital flexors, and gastrocnemius tendons encountered peak stresses of 25.6, 19.1, and 6.0 MPa, respectively, transmitting the forces of their corresponding muscles (peak force 3.3, 2.0, and 3.8 N, respectively). Notably, we found that the mean elastic energy recovered in the primary tendons of both hindlimbs comprised on average only 4.4% of the energy of the associated leap.
The limited use of tendon elastic energy storage in the jerboa parallels the morphologically similar heteromyid kangaroo rat, . When compared to larger saltatory kangaroos and wallabies that sustain hopping over longer periods of time, these small saltatory rodents store and recover less elastic strain energy in their tendons. The large contribution of muscle work, rather than elastic strain energy, to the vertical leap suggests that the fitness benefit of rapid acceleration for predator avoidance dominated over the need to enhance locomotor economy in the evolutionary history of jerboas.
埃及小跳鼠是一种小型双足哺乳动物,后肢细长,众多历史记载都特别提到了它们非凡的跳跃能力。我们在实验室环境中观察了跳鼠的运动,并进行了逆动力学分析,以了解这种小型啮齿动物是如何产生如此令人印象深刻的跳跃的。我们结合了视频中的运动学数据、力平台的动力学数据以及解剖学的形态测量数据,来计算每条后肢肌肉和肌腱对总运动的相对贡献。
跳鼠跳跃高度超过其髋部高度的10倍。在记录到的最大跳跃高度(而非观察到的最大跳跃高度)时,跖趾关节、踝关节、膝关节和髋关节的峰值力矩分别为13.1、58.4、65.1和66.9牛毫米。作用于踝关节的肌肉对垂直跳跃能量的贡献最大(平均231.6毫焦/千克体重),而作用于跖趾关节的肌肉产生的应力最大(峰值317.1千帕)。跖肌、指屈肌和腓肠肌腱分别承受了25.6、19.1和6.0兆帕的峰值应力,传递了其相应肌肉的力(峰值力分别为3.3、2.0和3.8牛)。值得注意的是,我们发现双后肢主要肌腱中恢复的平均弹性能量仅占相关跳跃能量的4.4%。
跳鼠对肌腱弹性储能的利用有限,这与形态相似的异鼠科更格卢鼠类似。与能长时间持续跳跃的较大型跳跃袋鼠和沙袋鼠相比,这些小型跳跃啮齿动物在肌腱中储存和恢复的弹性应变能较少。肌肉做功而非弹性应变能对垂直跳跃的巨大贡献表明,在跳鼠的进化历史中,为躲避捕食者而快速加速的适应性益处超过了提高运动经济性的需求。