Lerner Zachary F, Damiano Diane L, Bulea Thomas C
IEEE Int Conf Rehabil Robot. 2017 Jul;2017:491-497. doi: 10.1109/ICORR.2017.8009296.
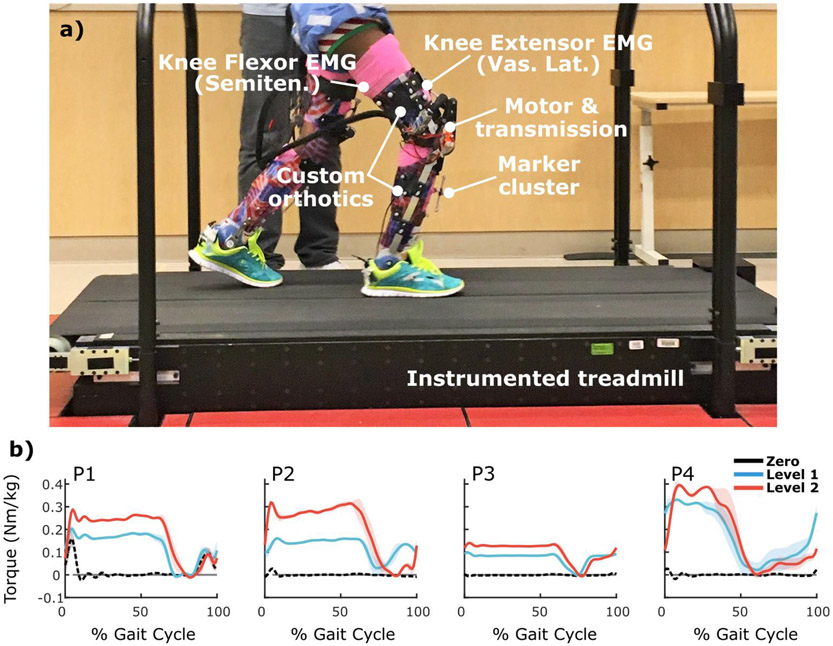
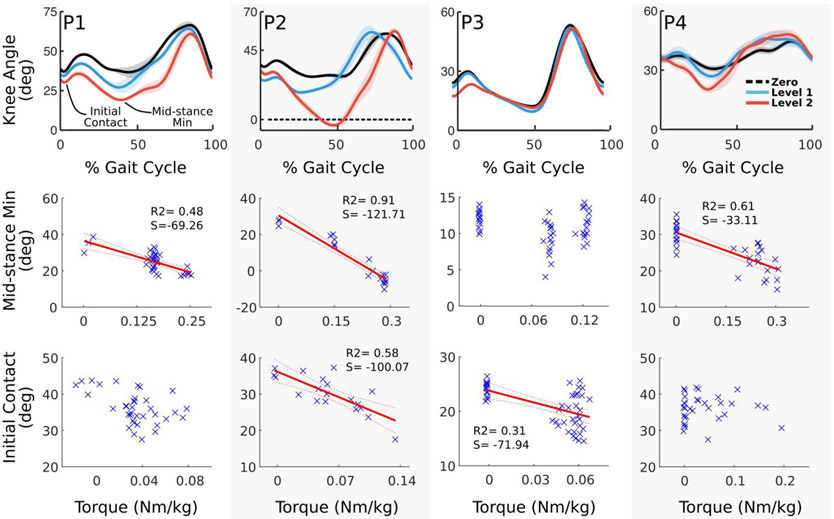
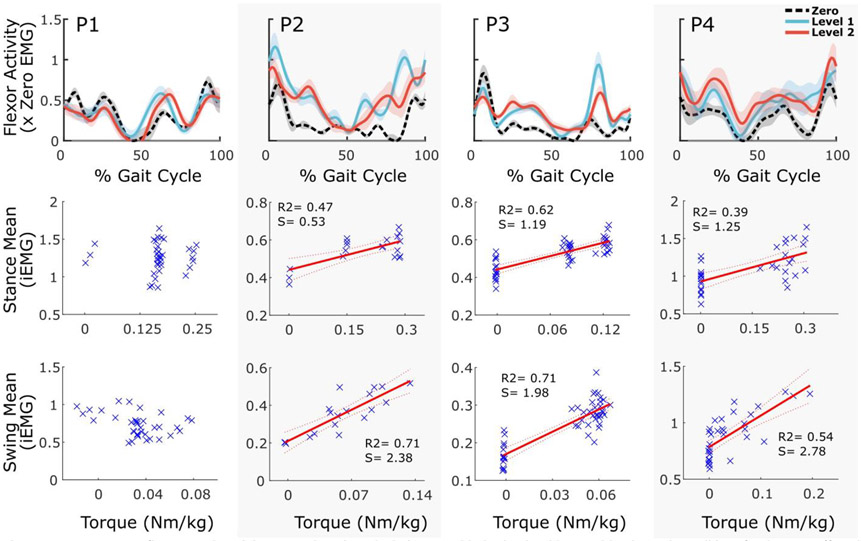
Crouch or "flexed knee" gait is a pathological gait pattern affecting many individuals with cerebral palsy. One proposed method to alleviate crouch is to provide robotic assistance to knee extension during walking. The purpose of this study was to evaluate how the magnitude of knee extensor torque affects knee kinematics, kinetics, and muscle activity. Motion capture, ground reaction force and electromyography data were collected while four participants with crouch gait from cerebral palsy walked with assistance from a novel robotic exoskeleton on an instrumented treadmill. Different magnitudes of knee extensor torque were provided during the stance (range: 0.09-0.38 Nm/kg) and swing (range: 0.09-0.29 Nm/kg) phases of the gait cycle. Using a linear regression analysis, we found that greater torque from the exoskeleton was positively associated with increased knee extension (reduction in crouch) at foot contact and mid-stance, negatively associated with the biological knee extensor moment, and positively associated with knee flexor muscle activity. Determining the relationships between exoskeleton assistance and knee kinematics and kinetics will benefit the continued investigation of robotic treatment strategies for treating crouch gait. Our findings indicate the importance of properly tuned robotic control strategies for gait rehabilitation.
蹲伏或“屈膝”步态是一种影响许多脑瘫患者的病理性步态模式。一种减轻蹲伏的方法是在行走过程中为膝关节伸展提供机器人辅助。本研究的目的是评估膝关节伸肌扭矩的大小如何影响膝关节的运动学、动力学和肌肉活动。当四名患有脑瘫蹲伏步态的参与者在装有仪器的跑步机上借助新型机器人外骨骼行走时,收集了运动捕捉、地面反作用力和肌电图数据。在步态周期的站立期(范围:0.09 - 0.38 Nm/kg)和摆动期(范围:0.09 - 0.29 Nm/kg)提供了不同大小的膝关节伸肌扭矩。通过线性回归分析,我们发现外骨骼产生的更大扭矩与足接触和站立中期膝关节伸展增加(蹲伏减少)呈正相关,与生物性膝关节伸肌力矩呈负相关,与膝关节屈肌肌肉活动呈正相关。确定外骨骼辅助与膝关节运动学和动力学之间的关系将有助于继续研究治疗蹲伏步态的机器人治疗策略。我们的研究结果表明了为步态康复正确调整机器人控制策略的重要性。