Junior Research Group wearHEALTH, Technische Universität Kaiserslautern, Gottlieb-Daimler-Str. 48, 67663 Kaiserslautern, Germany.
Department of Sports Science, Technische Universität Kaiserslautern, Erwin-Schrödinger-Str. 57, 67663 Kaiserslautern, Germany.
Sensors (Basel). 2018 Jun 21;18(7):1980. doi: 10.3390/s18071980.
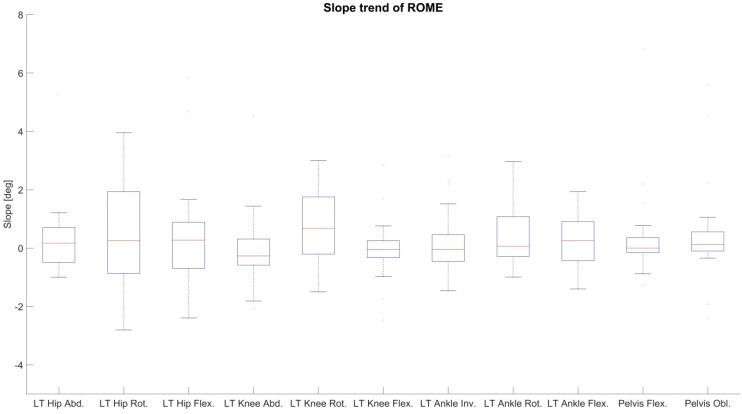
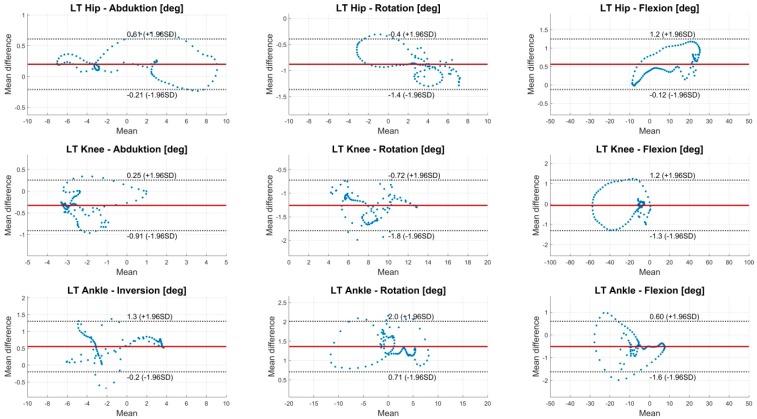
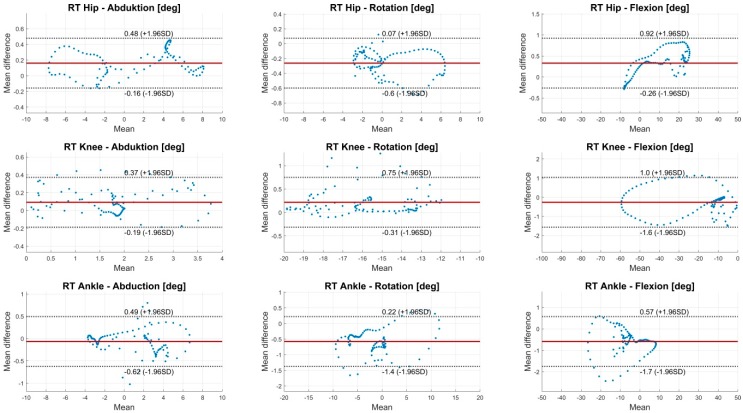
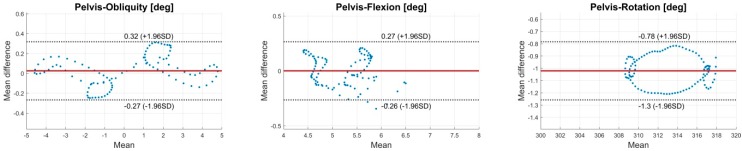
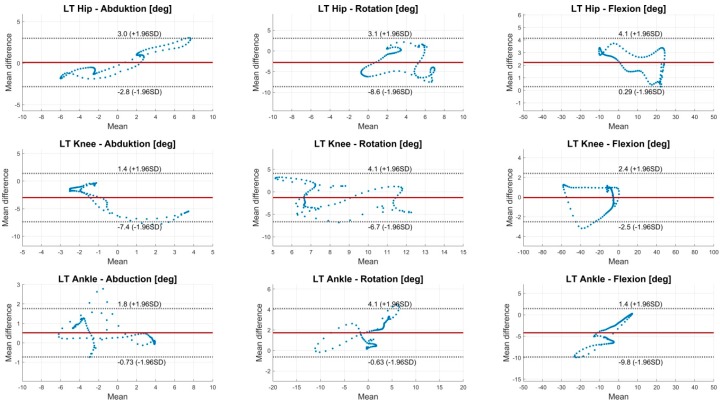
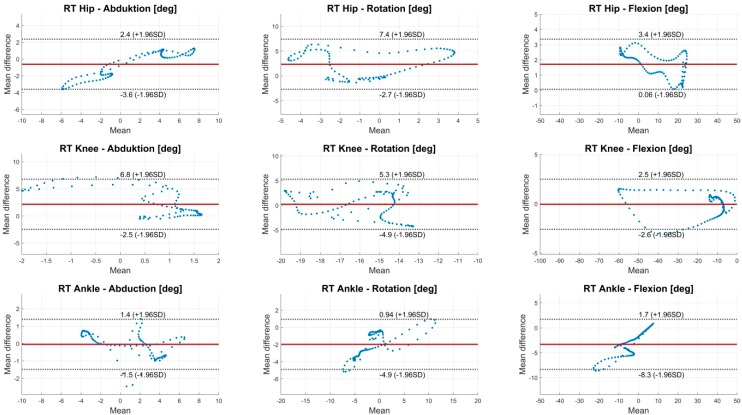
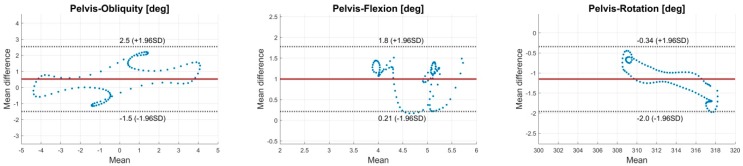
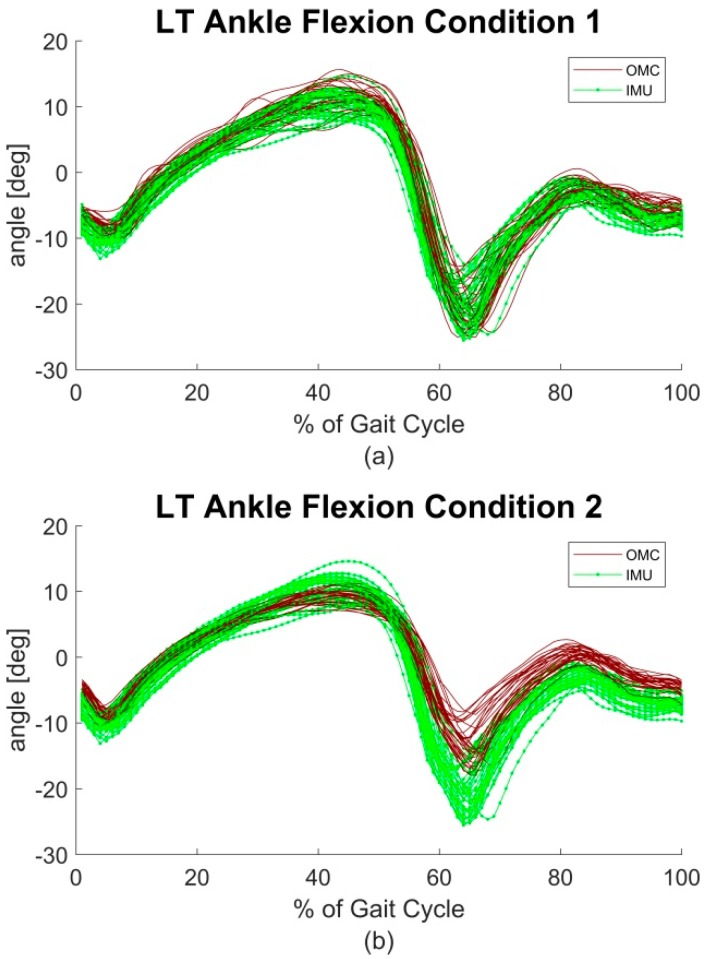
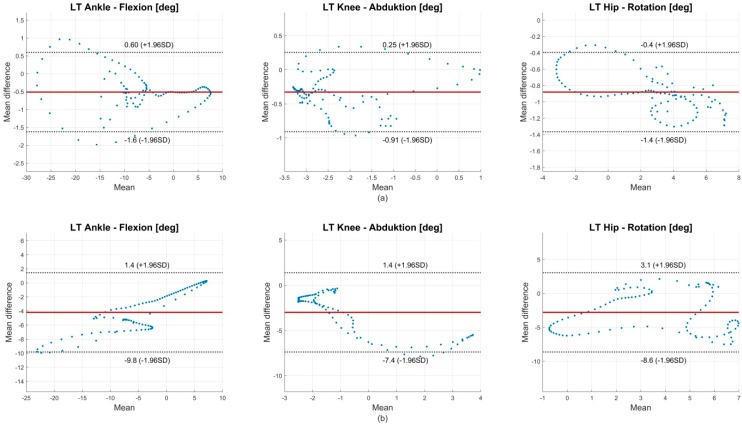
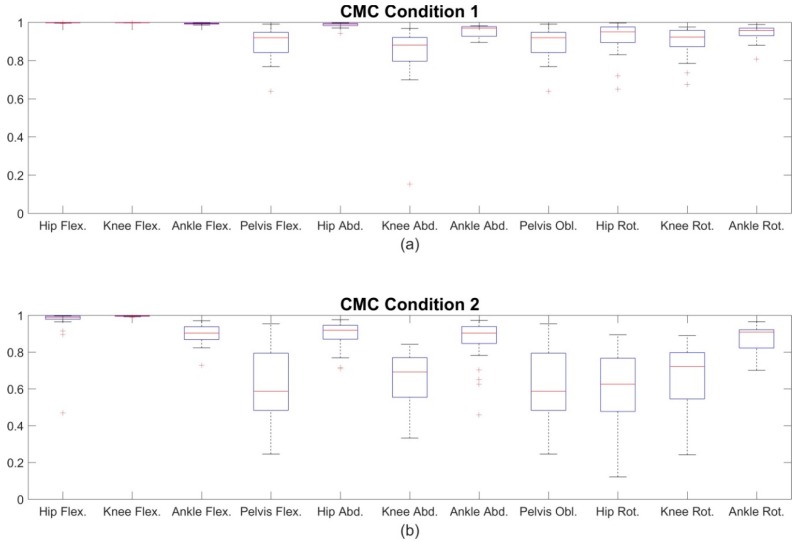
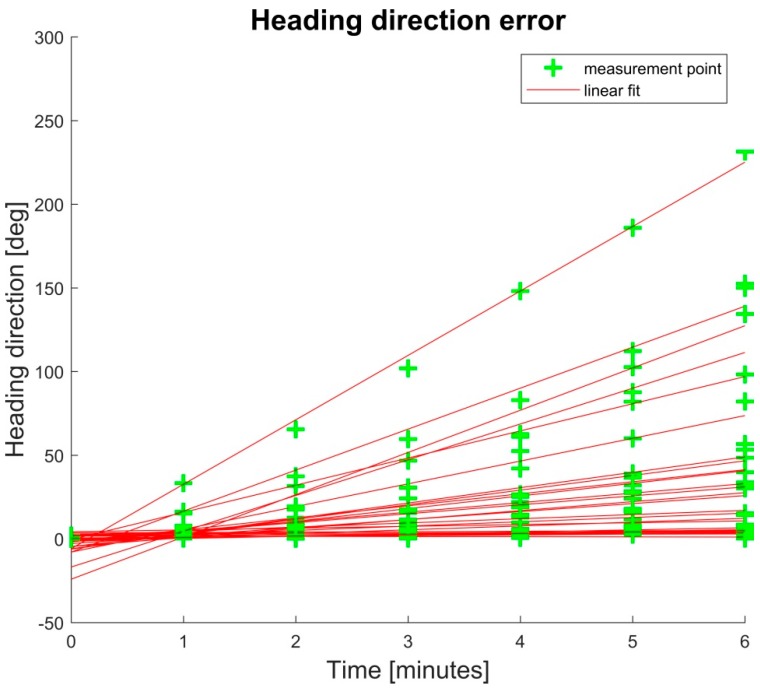
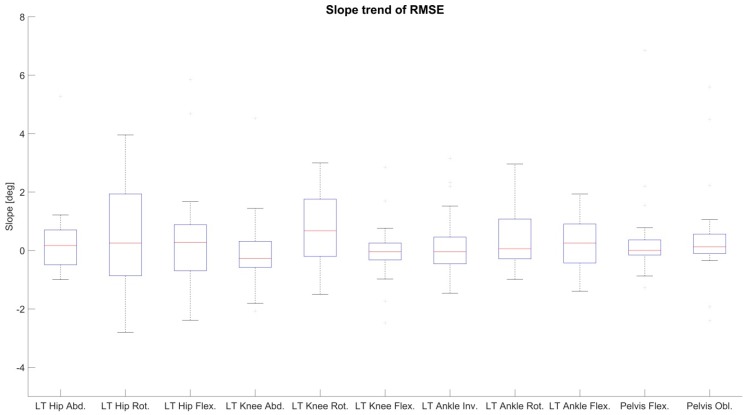
The present study investigates an algorithm for the calculation of 3D joint angles based on inertial measurement units (IMUs), omitting magnetometer data. Validity, test-retest reliability, and long-term stability are evaluated in reference to an optical motion capture (OMC) system. Twenty-eight healthy subjects performed a 6 min walk test. Three-dimensional joint kinematics of the lower extremity was recorded simultaneously by means of seven IMUs and an OptiTrack OMC system. To evaluate the performance, the root mean squared error (RMSE), mean range of motion error (ROME), coefficient of multiple correlations (CMC), Bland-Altman (BA) analysis, and intraclass correlation coefficient (ICC) were calculated. For all joints, the RMSE was lower than 2.40°, and the ROME was lower than 1.60°. The CMC revealed good to excellent waveform similarity. Reliability was moderate to excellent with ICC values of 0.52⁻0.99 for all joints. Error measures did not increase over time. When considering soft tissue artefacts, RMSE and ROME increased by an average of 2.2° ± 1.5° and 2.9° ± 1.7°. This study revealed an excellent correspondence of a magnetometer-free IMU system with an OMC system when excluding soft tissue artefacts.
本研究提出了一种基于惯性测量单元(IMU)计算 3D 关节角度的算法,不使用磁力计数据。通过与光学运动捕捉(OMC)系统进行对比,评估了其有效性、测试-再测试可靠性和长期稳定性。28 名健康受试者进行了 6 分钟步行测试。通过 7 个 IMU 和 OptiTrack OMC 系统同时记录下肢的三维关节运动学。为了评估性能,计算了均方根误差(RMSE)、平均运动范围误差(ROME)、多相关系数(CMC)、Bland-Altman(BA)分析和组内相关系数(ICC)。对于所有关节,RMSE 均低于 2.40°,ROME 均低于 1.60°。CMC 显示出良好到极好的波形相似性。可靠性为中等至高,所有关节的 ICC 值为 0.52⁻0.99。误差测量值不会随时间增加。考虑到软组织伪影时,RMSE 和 ROME 分别平均增加了 2.2° ± 1.5°和 2.9° ± 1.7°。本研究表明,在排除软组织伪影的情况下,无磁力计的 IMU 系统与 OMC 系统具有极好的对应关系。