Zhang Jianhua, Guo Jingjing, Mou Fangzhi, Guan Jianguo
State Key Laboratory of Advanced Technology for Materials Synthesis and Processing, International School of Materials Science and Engineering, Wuhan University of Technology, Wuhan 430070, China.
Micromachines (Basel). 2018 Feb 19;9(2):88. doi: 10.3390/mi9020088.
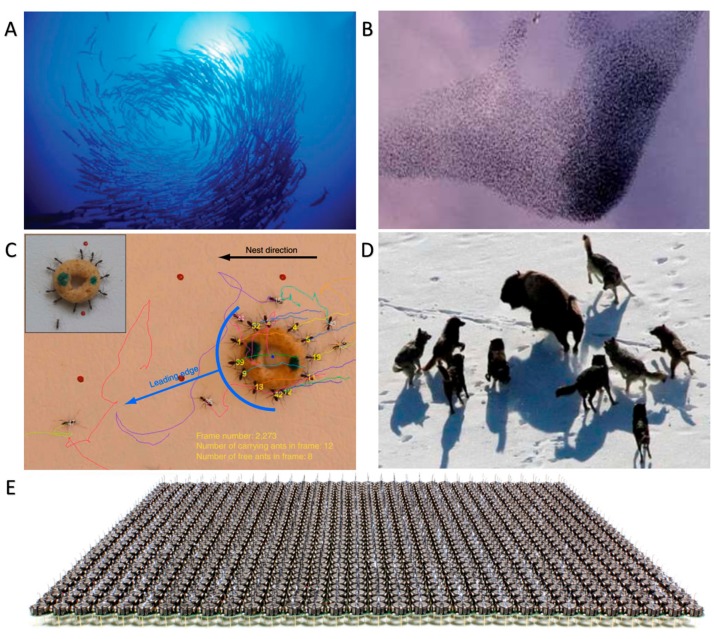
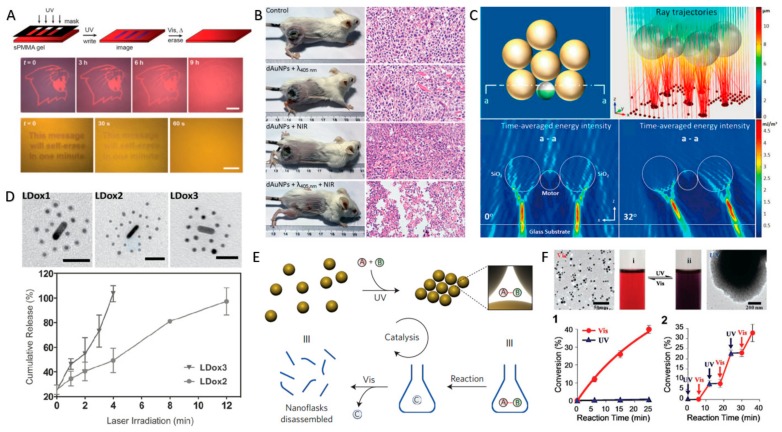
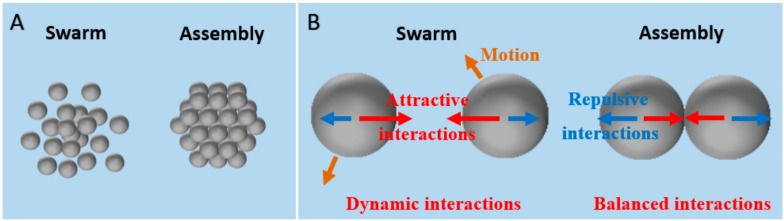
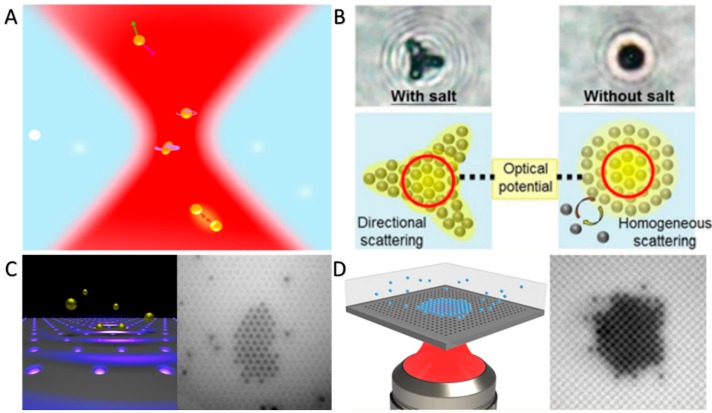
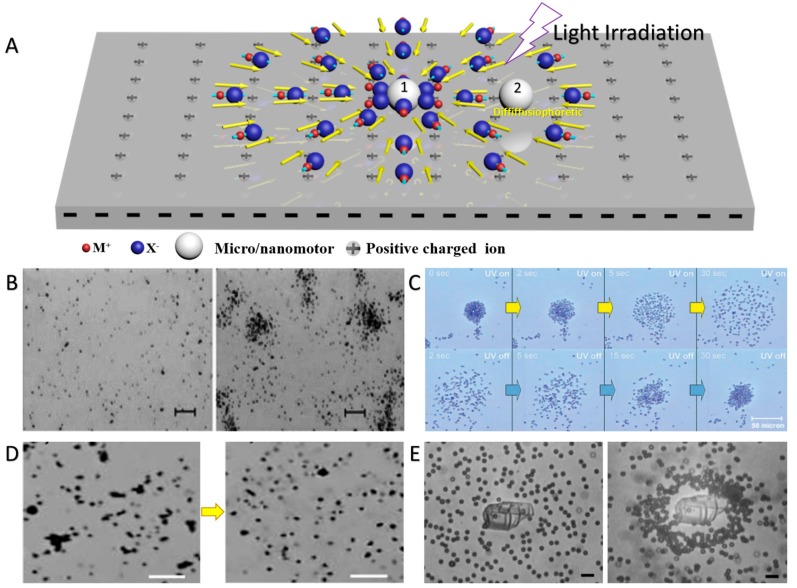
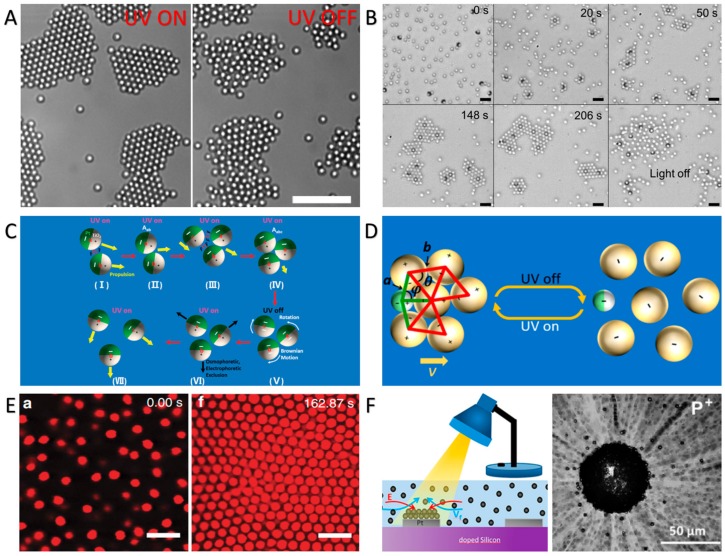
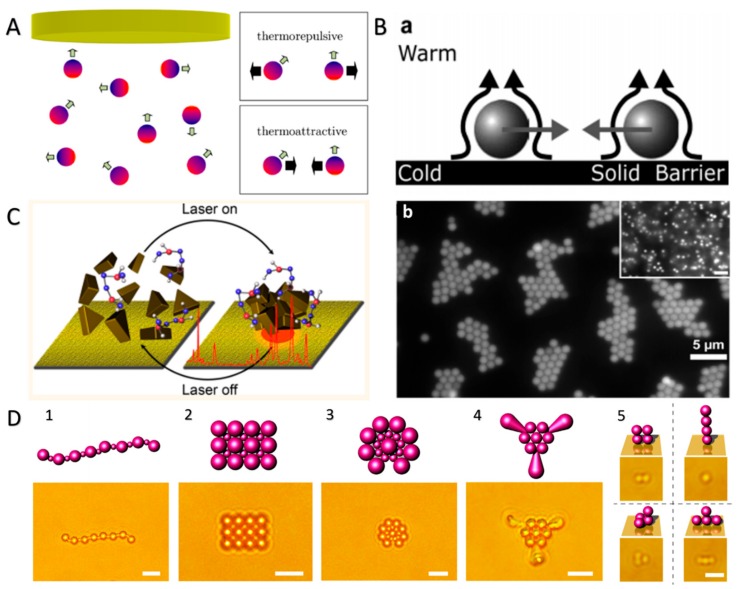
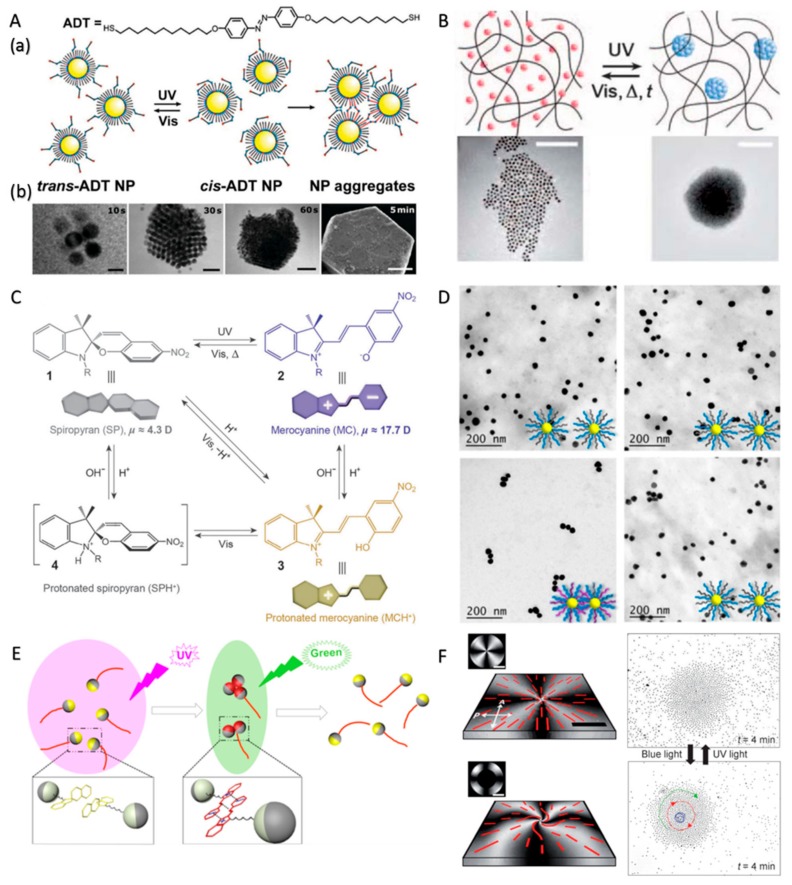
Swarms and assemblies are ubiquitous in nature and they can perform complex collective behaviors and cooperative functions that they cannot accomplish individually. In response to light, some colloidal particles (CPs), including light active and passive CPs, can mimic their counterparts in nature and organize into complex structures that exhibit collective functions with remote controllability and high temporospatial precision. In this review, we firstly analyze the structural characteristics of swarms and assemblies of CPs and point out that light-controlled swarming and assembly of CPs are generally achieved by constructing light-responsive interactions between CPs. Then, we summarize in detail the recent advances in light-controlled swarming and assembly of CPs based on the interactions arisen from optical forces, photochemical reactions, photothermal effects, and photoisomerizations, as well as their potential applications. In the end, we also envision some challenges and future prospects of light-controlled swarming and assembly of CPs. With the increasing innovations in mechanisms and control strategies with easy operation, low cost, and arbitrary applicability, light-controlled swarming and assembly of CPs may be employed to manufacture programmable materials and reconfigurable robots for cooperative grasping, collective cargo transportation, and micro- and nanoengineering.
群体和聚集体在自然界中无处不在,它们能够执行复杂的集体行为和协作功能,而这些是它们单独无法完成的。响应光照时,一些胶体粒子(CPs),包括光活性和光惰性CPs,能够模仿自然界中的对应物,组织形成具有远程可控性和高时空精度的展现集体功能的复杂结构。在本综述中,我们首先分析CPs群体和聚集体的结构特征,并指出CPs的光控群体形成和聚集通常是通过构建CPs之间的光响应相互作用来实现的。然后,我们详细总结了基于光力、光化学反应、光热效应和光异构化产生的相互作用,CPs在光控群体形成和聚集方面的最新进展及其潜在应用。最后,我们还展望了CPs光控群体形成和聚集面临的一些挑战和未来前景。随着机制和控制策略不断创新,操作简便、成本低廉且适用性广泛,CPs的光控群体形成和聚集可用于制造可编程材料和可重构机器人,用于协同抓取、集体货物运输以及微纳工程。