Department of Biomedical Engineering, McCormick School of Engineering, 645 N Michigan Ave, Suite 1109, Chicago, IL, 60611, USA.
Center for Bionic Medicine, 355 East Erie, Chicago, IL, 60611, USA.
J Neuroeng Rehabil. 2019 Mar 5;16(1):35. doi: 10.1186/s12984-019-0504-1.
Abnormal synergy is a major stroke-related movement impairment that presents as an unintentional contraction of muscles throughout a limb. The flexion synergy, consisting of involuntary flexion coupling of the paretic elbow, wrist, and fingers, is caused by and proportional to the amount of shoulder abduction effort and limits reaching function. A wearable exoskeleton capable of predicting movement intent could augment abduction effort and therefore reduce the negative effects of distal joint flexion synergy. However, predicting movement intent from abnormally-coupled torques or EMG signals and subsequent use as a control signal remains elusive. One control strategy that has proven viable, effective, and computationally efficient in myoelectric prostheses for use in individuals with amputation is linear discriminant analysis (LDA)-based pattern recognition. However, following stroke, shoulder effort has been shown to have a negative effect on classification accuracy of hand tasks due to the multi-joint torque coupling of abnormal synergy. This study focuses on the evaluation of an LDA-based classifier to predict individual degrees-of-freedom of the shoulder and elbow joints.
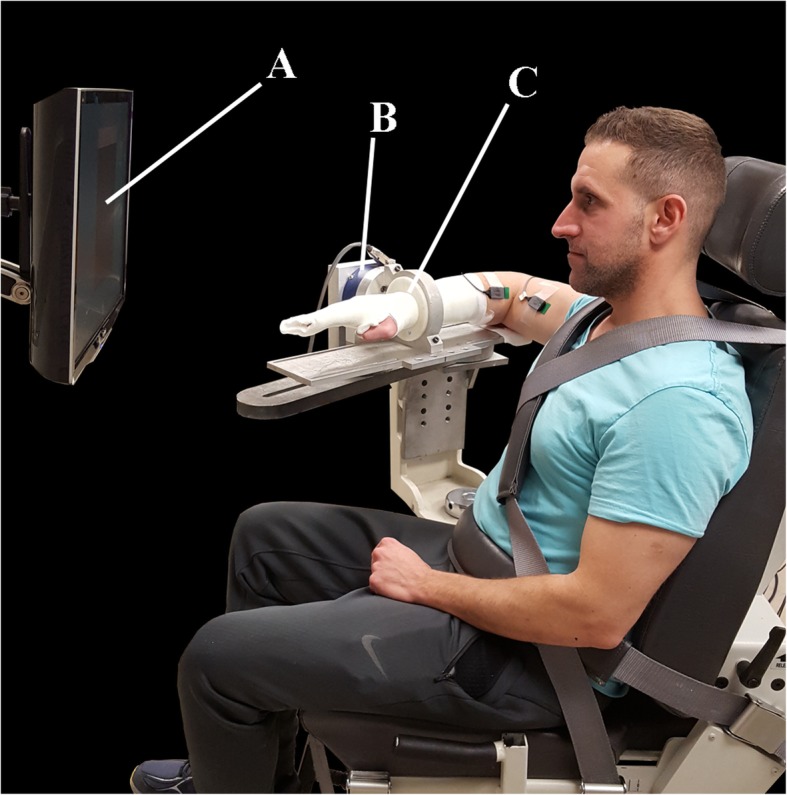
Six degree-of-freedom load cell data along with eight channels of EMG data were recorded during eight tasks (shoulder abduction and adduction, horizontal abduction and adduction, internal rotation and external rotation, and elbow flexion and extension) and used to create feature sets for LDA-based classifiers to distinguish between these eight classes.
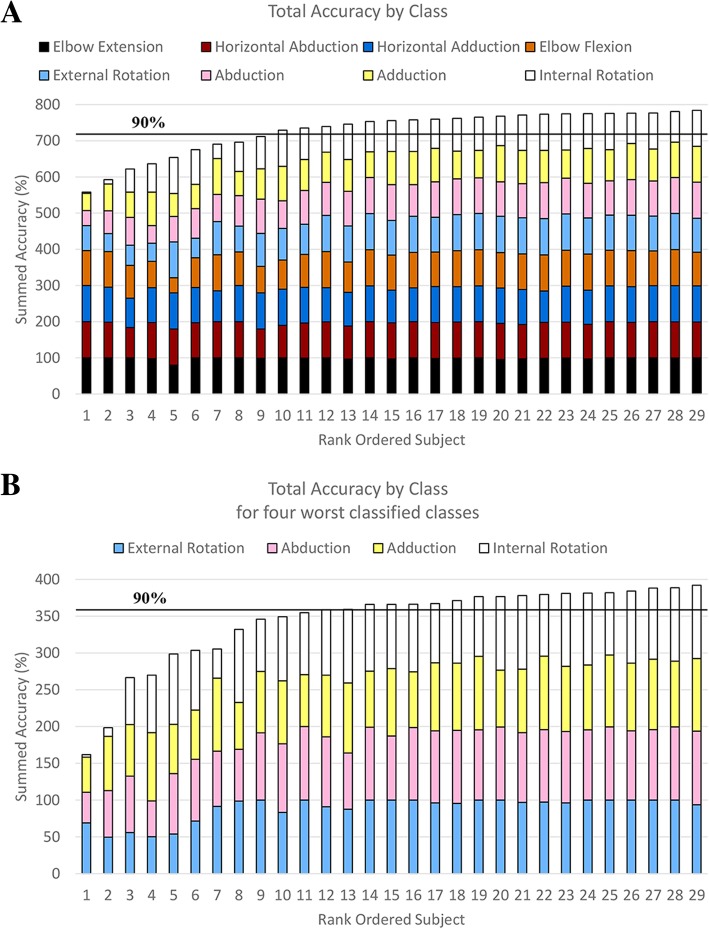
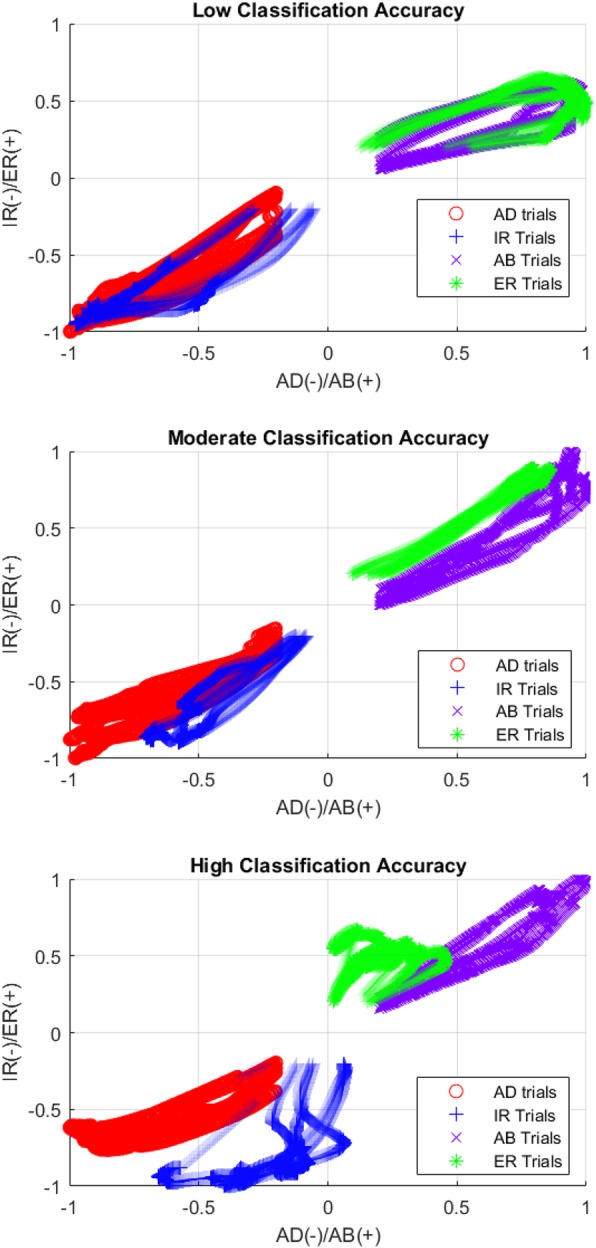
Cross-validation yielded functional offline classification accuracies (> 90%) for two of the eight classes using EMG-only, four of the eight classes using load cell-only, and six of the eight classes using a combined feature set with average accuracies of 83, 91, and 92% respectively.
The most common misclassifications were between shoulder adduction and internal rotation followed by shoulder abduction and external rotation. It is unknown whether the strategies used were due to abnormal synergy or other factors. LDA-based pattern recognition may be a viable control option for predicting movement intention and providing a control signal for a wearable exoskeletal assistive device. Future work will need to test the approach in a more complex multi-joint task, specifically one that attempts to tease apart shoulder abduction/external rotation and adduction/internal rotation.
异常协同是一种主要的与中风相关的运动障碍,表现为肢体无意识的肌肉收缩。屈肌协同,包括瘫痪肘部、手腕和手指的不自主屈肌耦合,是由肩部外展用力的程度和限制伸展功能引起的,并与肩部外展用力的程度成比例。一种能够预测运动意图的可穿戴式外骨骼可以增强外展用力,从而减少远端关节屈肌协同的负面影响。然而,从异常耦合扭矩或肌电图信号中预测运动意图,并将其作为控制信号使用,仍然难以实现。一种在截肢患者使用的肌电假肢中被证明是可行、有效和计算高效的控制策略是基于线性判别分析(LDA)的模式识别。然而,中风后,由于异常协同的多关节扭矩耦合,肩部用力已被证明对手部任务的分类准确性有负面影响。本研究集中于评估基于 LDA 的分类器,以预测肩部和肘部关节的个体自由度。
在八个任务(肩部外展和内收、水平外展和内收、内旋和外旋、肘部弯曲和伸展)期间记录了六个自由度的负载细胞数据和八个通道的肌电图数据,并将其用于创建基于 LDA 的分类器的特征集,以区分这八个类别。
使用肌电图数据仅对其中两个类别、使用负载细胞数据仅对其中四个类别、使用组合特征集对其中六个类别进行交叉验证,离线分类准确率分别为>90%、83%、91%和 92%。
最常见的错误分类是肩部内收和内旋之间,其次是肩部外展和外旋之间。尚不清楚所使用的策略是由于异常协同还是其他因素。基于 LDA 的模式识别可能是预测运动意图和为可穿戴式外骨骼辅助设备提供控制信号的可行控制选项。未来的工作将需要在更复杂的多关节任务中测试该方法,特别是尝试分离肩部外展/外旋和内收/内旋的任务。