Next Generation Artificial Intelligence Research Center & School of Information Science and Technology, The University of Tokyo , 7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656 , Japan.
Philos Trans R Soc Lond B Biol Sci. 2019 Apr 29;374(1771):20180031. doi: 10.1098/rstb.2018.0031.
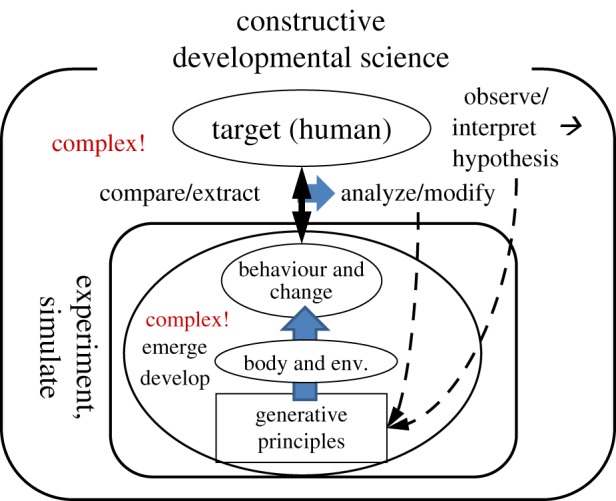
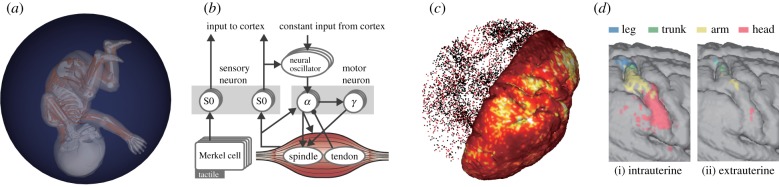
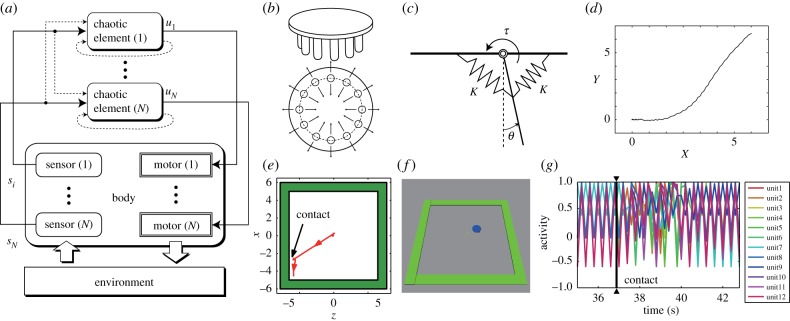
Human-centred AI/Robotics are quickly becoming important. Their core claim is that AI systems or robots must be designed and work for the benefits of humans with no harm or uneasiness. It essentially requires the realization of autonomy, sociality and their fusion at all levels of system organization, even beyond programming or pre-training. The biologically inspired core principle of such a system is described as the emergence and development of embodied behaviour and cognition. The importance of embodiment, emergence and continuous autonomous development is explained in the context of developmental robotics and dynamical systems view of human development. We present a hypothetical early developmental scenario that fills in the very beginning part of the comprehensive scenarios proposed in developmental robotics. Then our model and experiments on emergent embodied behaviour are presented. They consist of chaotic maps embedded in sensory-motor loops and coupled via embodiment. Behaviours that are consistent with embodiment and adaptive to environmental structure emerge within a few seconds without any external reward or learning. Next, our model and experiments on human fetal development are presented. A precise musculo-skeletal fetal body model is placed in a uterus model. Driven by spinal nonlinear oscillator circuits coupled together via embodiment, somatosensory signals are evoked and learned by a model of the cerebral cortex with 2.6 million neurons and 5.3 billion synapses. The model acquired cortical representations of self-body and multi-modal sensory integration. This work is important because it models very early autonomous development in realistic detailed human embodiment. Finally, discussions toward human-like cognition are presented including other important factors such as motivation, emotion, internal organs and genetic factors. This article is part of the theme issue 'From social brains to social robots: applying neurocognitive insights to human-robot interaction'.
以人为本的人工智能/机器人技术正迅速变得重要起来。它们的核心主张是,人工智能系统或机器人必须为人类的利益而设计和工作,不能造成伤害或不适。这实质上要求在系统组织的各个层次上实现自主性、社会性及其融合,甚至超越编程或预训练。这种系统的生物启发核心原则被描述为体现行为和认知的出现和发展。在发展机器人学和人类发展的动力系统观点的背景下,阐述了体现、涌现和持续自主发展的重要性。我们提出了一个假设的早期发展情景,填补了发展机器人学中提出的综合情景的非常早期部分。然后,我们提出了关于涌现体现行为的模型和实验。它们由嵌入在感觉运动循环中的混沌图组成,并通过体现来耦合。在没有任何外部奖励或学习的情况下,在几秒钟内就会出现与体现一致且适应环境结构的行为。接下来,我们提出了关于人类胎儿发育的模型和实验。一个精确的肌肉骨骼胎儿模型被放置在子宫模型中。由通过体现耦合在一起的脊髓非线性振荡器电路驱动,躯体感觉信号被诱发并由具有 260 万个神经元和 53 亿个突触的大脑皮层模型学习。该模型获得了自我身体和多模态感觉整合的皮层表示。这项工作很重要,因为它在现实详细的人类体现中模拟了非常早期的自主发展。最后,我们提出了关于类人认知的讨论,包括动机、情感、内脏器官和遗传因素等其他重要因素。本文是主题为“从社会大脑到社会机器人:将神经认知见解应用于人机交互”的一部分。