Kianifar Rezvan, Joukov Vladimir, Lee Alexander, Raina Sachin, Kulić Dana
Electrical and Computer Engineering Department, University of Waterloo, Waterloo, ON, Canada.
MSK Metrics, Mississauga, Canada.
J Rehabil Assist Technol Eng. 2019 Jan 14;6:2055668318813455. doi: 10.1177/2055668318813455. eCollection 2019 Jan-Dec.
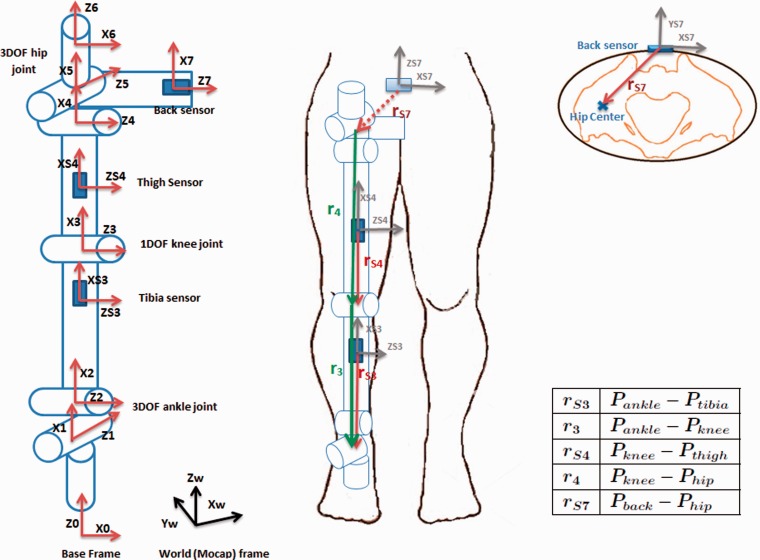
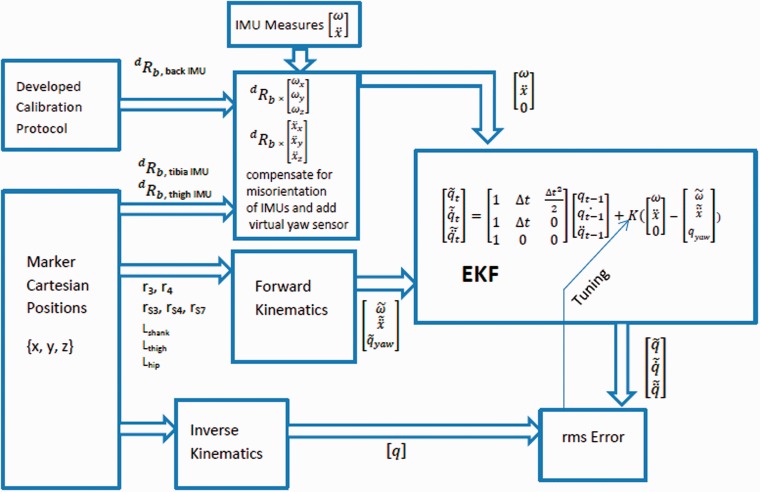
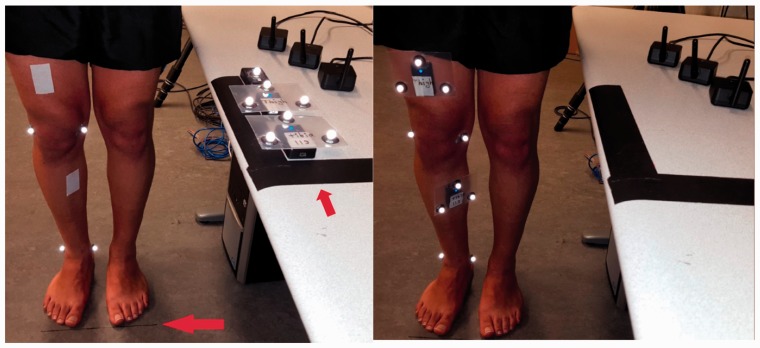
Inertial measurement units have been proposed for automated pose estimation and exercise monitoring in clinical settings. However, many existing methods assume an extensive calibration procedure, which may not be realizable in clinical practice. In this study, an inertial measurement unit-based pose estimation method using extended Kalman filter and kinematic chain modeling is adapted for lower body pose estimation during clinical mobility tests such as the single leg squat, and the sensitivity to parameter calibration is investigated.
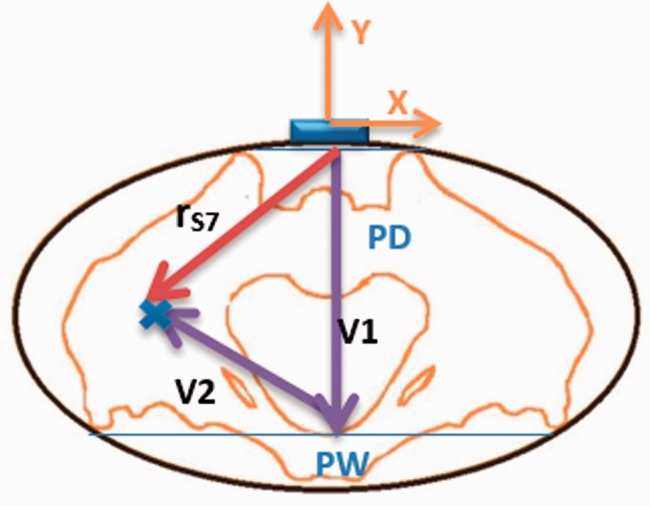
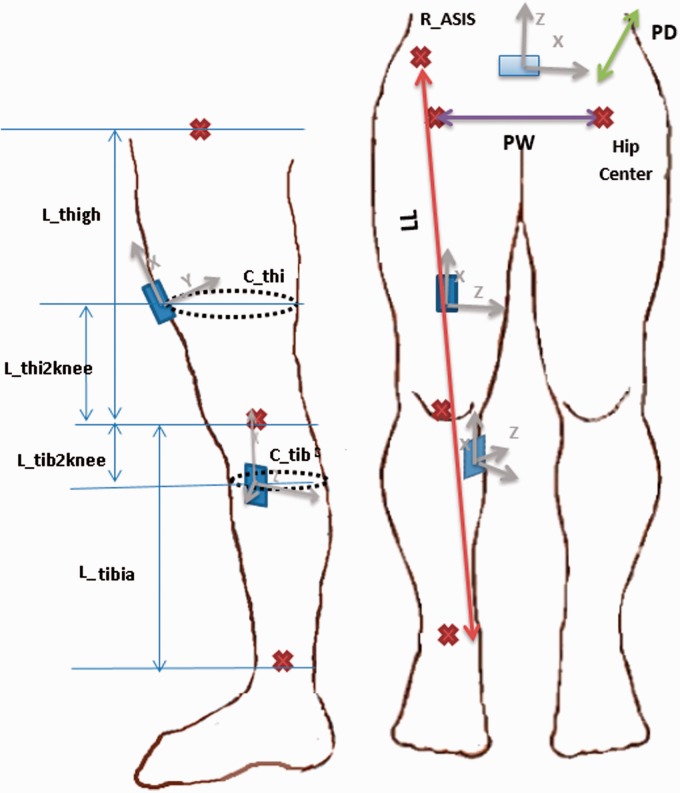
The sensitivity of pose estimation accuracy to each of the kinematic model and sensor placement parameters was analyzed. Sensitivity analysis results suggested that accurate extraction of inertial measurement unit orientation on the body is a key factor in improving the accuracy. Hence, a simple calibration protocol was proposed to reach a better approximation for inertial measurement unit orientation.
After applying the protocol, the ankle, knee, and hip joint angle errors improved to , and , without the need for any other calibration.
Only a small subset of kinematic and sensor parameters contribute significantly to pose estimation accuracy when using body worn inertial sensors. A simple calibration procedure identifying the inertial measurement unit orientation on the body can provide good pose estimation performance.
惯性测量单元已被提议用于临床环境中的自动姿势估计和运动监测。然而,许多现有方法都假定有一个广泛的校准程序,而这在临床实践中可能无法实现。在本研究中,一种基于惯性测量单元的姿势估计方法,利用扩展卡尔曼滤波器和运动链建模,适用于诸如单腿深蹲等临床移动测试中的下肢姿势估计,并研究了对参数校准的敏感性。
分析了姿势估计精度对运动学模型和传感器放置参数中每一个参数的敏感性。敏感性分析结果表明,准确提取身体上惯性测量单元的方向是提高精度的关键因素。因此,提出了一种简单的校准协议,以更好地逼近惯性测量单元的方向。
应用该协议后,踝关节、膝关节和髋关节角度误差分别改善到 、 和 ,无需任何其他校准。
使用身体佩戴式惯性传感器时,只有一小部分运动学和传感器参数对姿势估计精度有显著贡献。一个识别身体上惯性测量单元方向的简单校准程序可以提供良好的姿势估计性能。