Department of Orthopedics, Beijing Chaoyang Hospital, Capital Medical University, Beijing, China.
Chaoyang-Tsinghua Digitization & Artificial Intelligence Orthopedic Laboratory, Beijing, China.
J Orthop Surg Res. 2020 Oct 19;15(1):479. doi: 10.1186/s13018-020-02003-y.
Transforaminal percutaneous endoscopic lumbar surgeries (PELS) for lumbar disc herniation and spinal stenosis are growing in popularity. However, there are some problems in the establishment of the working channel and foraminoplasty such as nerve and blood vessel injuries, more radiation exposure, and steeper learning curve. Rapid technological advancements have allowed robotic technology to assist surgeons in improving the accuracy and safety of surgeries. Therefore, the purpose of this study is to develop a robot-assisted system for transforaminal PELS, which can provide navigation and foraminoplasty.
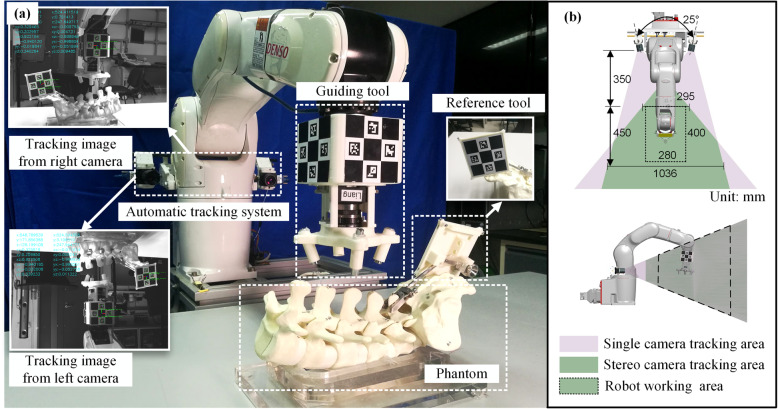
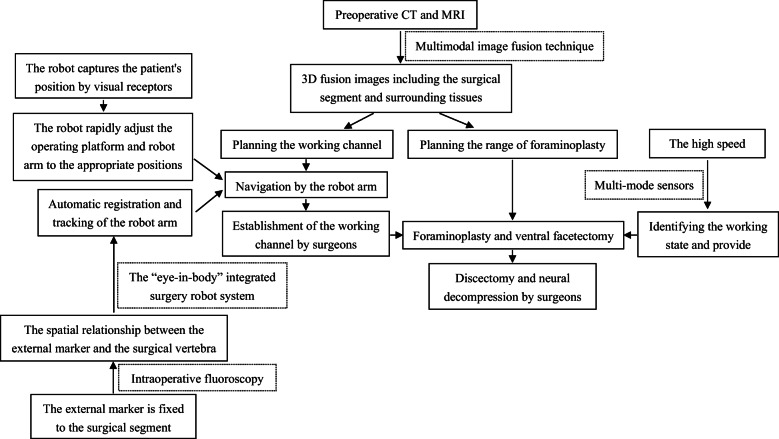
The robot-assisted system consists of three systems: preoperative planning system, navigation system, and foraminoplasty system. In the preoperative planning system, 3D visualization of the surgical segment and surrounding tissues are realized using the multimodal image fusion technique of computed tomography and magnetic resonance imaging, and the working channel planning is carried out to reduce the risk for injury to vital blood vessels and nerves. In the navigation system, the robot can obtain visual perception ability from a visual receptor and automatically adjust the robotic platform and robot arm to the appropriate positions according to the patient's position and preoperative plan. In addition, the robot can automatically register the surgical levels through intraoperative fluoroscopy. After that, the robot will provide navigation using the 6 degree-of-freedom (DOF) robot arm according to the preoperative planning system and guide the surgeon to complete the establishment of the working channel. In the foraminoplasty system, according to the foraminoplasty planning in the preoperative planning system, the robot performs foraminoplasty automatically using the high speed burr at the end of the robot arm. The system can provide real-time feedback on the working status of the bur through multi-mode sensors such as multidimensional force, position, and acceleration. Finally, a prototype of the system is constructed and performance tests are conducted.
Our study will develop a robot-assisted system to perform transforaminal PELS, and this robot-assisted system can also be used for other percutaneous endoscopic spinal surgeries such as interlaminar PELS and percutaneous endoscopic cervical and thoracic surgeries through further research. The development of this robot-assisted system can be of great significance. First, the robot can improve the accuracy and efficiency of endoscopic spinal surgeries. In addition, it can avoid multiple intraoperative fluoroscopies, minimize exposure to both patients and the surgical staff, shorten the operative time, and improve the learning curve of beginners, which is beneficial to the popularization of percutaneous endoscopic spinal surgeries.
经皮内窥镜腰椎手术(PELS)治疗腰椎间盘突出症和腰椎管狭窄症越来越受欢迎。然而,在建立工作通道和椎间孔成形术方面存在一些问题,例如神经和血管损伤、更多的辐射暴露和更陡峭的学习曲线。快速的技术进步使得机器人技术能够帮助外科医生提高手术的准确性和安全性。因此,本研究的目的是开发一种用于经皮内窥镜腰椎手术的机器人辅助系统,该系统可以提供导航和椎间孔成形术。
机器人辅助系统由三个系统组成:术前规划系统、导航系统和椎间孔成形术系统。在术前规划系统中,使用 CT 和磁共振成像的多模态图像融合技术实现手术节段和周围组织的三维可视化,并进行工作通道规划,以降低损伤重要血管和神经的风险。在导航系统中,机器人可以从视觉传感器获得视觉感知能力,并根据患者的位置和术前计划自动调整机器人平台和机器臂的位置。此外,机器人可以通过术中透视自动注册手术节段。之后,机器人将根据术前规划系统提供 6 自由度(DOF)机器人臂导航,并引导外科医生完成工作通道的建立。在椎间孔成形术系统中,根据术前规划系统中的椎间孔成形术规划,机器人使用机器臂末端的高速磨头自动进行椎间孔成形术。系统可以通过多维力、位置和加速度等多模式传感器实时反馈磨头的工作状态。最后,构建了系统的原型,并进行了性能测试。
我们的研究将开发一种用于经皮内窥镜腰椎手术的机器人辅助系统,该机器人辅助系统还可以通过进一步研究用于其他经皮内窥镜脊柱手术,如经椎间孔 PELS 和经皮内窥镜颈椎和胸椎手术。该机器人辅助系统的开发具有重要意义。首先,机器人可以提高内窥镜脊柱手术的准确性和效率。此外,它可以避免多次术中透视,最大限度地减少患者和手术人员的辐射暴露,缩短手术时间,降低初学者的学习曲线,有利于经皮内窥镜脊柱手术的推广。