División de Investigación y Posgrado, Facultad de Ingeniería, Universidad Autónoma de Querétaro, Querétaro 76010, Mexico.
Sensors (Basel). 2020 Oct 29;20(21):6155. doi: 10.3390/s20216155.
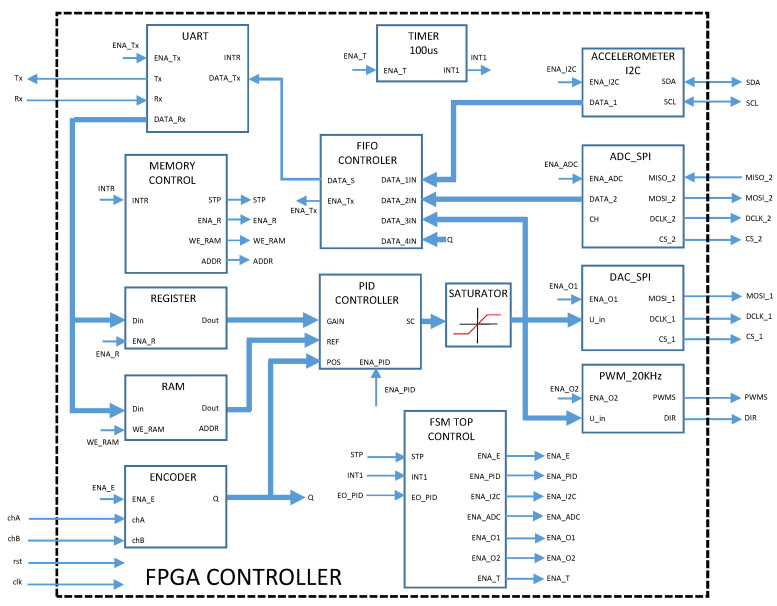
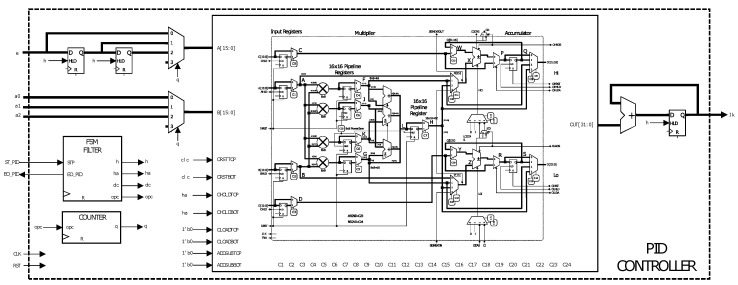
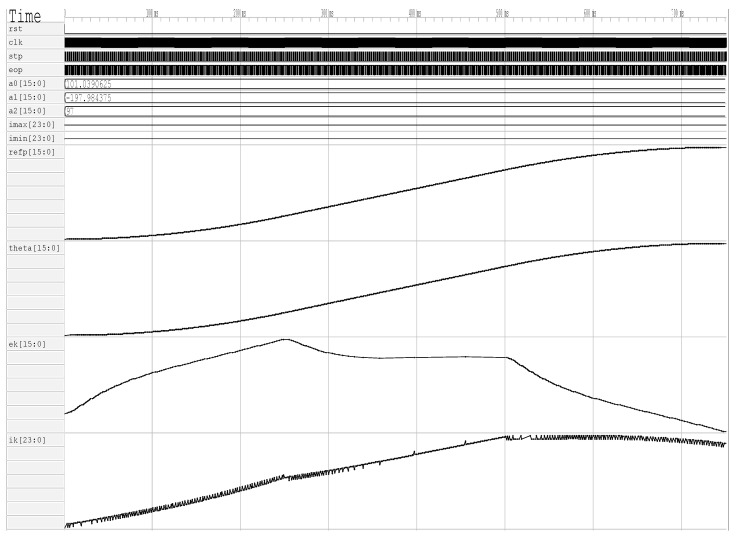
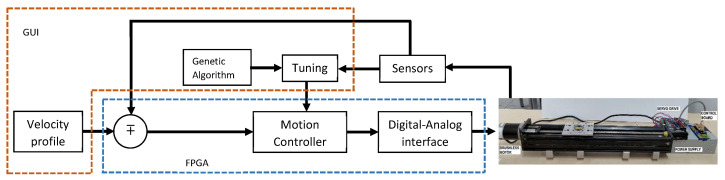
Servo systems are feedback control systems characterized by position, speed, and/or acceleration outputs. Nowadays, industrial advances make the electronic stages in these systems obsolete compared to the mechanical elements, which generates a recurring problem in technological, commercial and industrial applications. This article presents a methodology for the development of an open-architecture controller that is based on reconfigurable hardware under the open source concept for servo applications. The most outstanding contribution of this paper is the implementation of a Genetic Algorithm for online self tuning with a focus on both high-quality servo control and reduction of vibrations during the positioning of a linear motion system. The proposed techniques have been validated on a real platform and form a novel, effective approach as compared to the conventional tuning methods that employ empirical or analytical solutions and cannot improve their parameter set. The controller was elaborated from the Graphical User Interface to the logical implementation while using free tools. This approach also allows for modification and updates to be made easily, thereby reducing the susceptibility to obsolescence. A comparison of the logical implementation with the manufacturer software was also conducted in order to test the performance of free tools in FPGAs. The Graphical User Interface developed in Python presents features, such as speed profiling, controller auto-tuning, measurement of main parameters, and monitoring of servo system vibrations.
伺服系统是一种反馈控制系统,其输出特性包括位置、速度和/或加速度。如今,工业进步使得这些系统中的电子级相对于机械元件已经过时,这在技术、商业和工业应用中产生了一个反复出现的问题。本文提出了一种基于可重构硬件的开放式架构控制器的开发方法,该控制器基于开源概念,适用于伺服应用。本文的突出贡献在于实现了一种在线自整定遗传算法,重点是高质量的伺服控制和减少线性运动系统定位过程中的振动。所提出的技术已经在真实平台上得到验证,与采用经验或分析解决方案且无法改进其参数集的传统调谐方法相比,是一种新颖、有效的方法。该控制器从图形用户界面到逻辑实现都是使用免费工具精心设计的。这种方法还允许轻松进行修改和更新,从而降低过时的风险。还对逻辑实现与制造商软件进行了比较,以测试 FPGAs 中免费工具的性能。用 Python 开发的图形用户界面具有速度分析、控制器自动调谐、主要参数测量和监视伺服系统振动等功能。