Szczecinski Nicholas S, Quinn Roger D, Hunt Alexander J
Department of Mechanical and Aerospace Engineering, West Virginia University, Morgantown, WV, United States.
Department of Mechanical and Aerospace Engineering, Case Western Reserve University, Cleveland, OH, United States.
Front Neurorobot. 2020 Nov 13;14:577804. doi: 10.3389/fnbot.2020.577804. eCollection 2020.
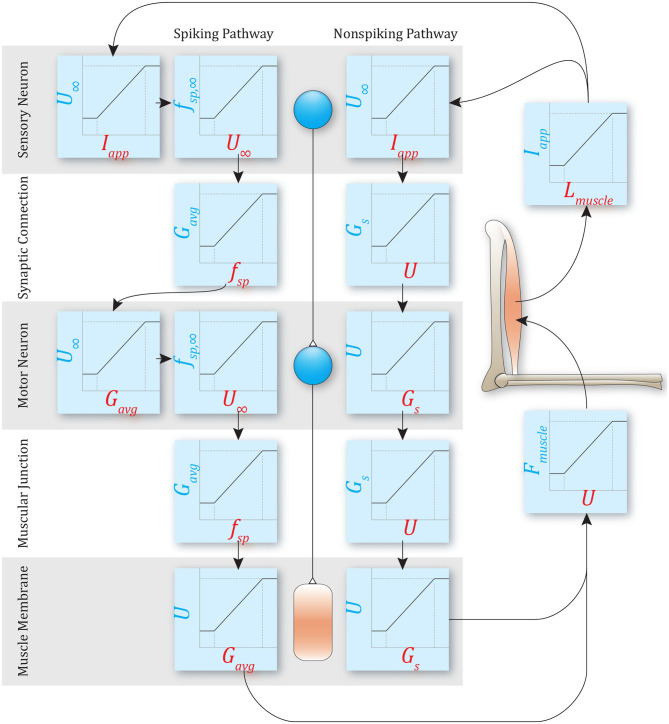
Engineering neural networks to perform specific tasks often represents a monumental challenge in determining network architecture and parameter values. In this work, we extend our previously-developed method for tuning networks of non-spiking neurons, the "Functional subnetwork approach" (FSA), to the tuning of networks composed of spiking neurons. This extension enables the direct assembly and tuning of networks of spiking neurons and synapses based on the network's intended function, without the use of global optimization or machine learning. To extend the FSA, we show that the dynamics of a generalized linear integrate and fire (GLIF) neuron model have fundamental similarities to those of a non-spiking leaky integrator neuron model. We derive analytical expressions that show functional parallels between: (1) A spiking neuron's steady-state spiking frequency and a non-spiking neuron's steady-state voltage in response to an applied current; (2) a spiking neuron's transient spiking frequency and a non-spiking neuron's transient voltage in response to an applied current; and (3) a spiking synapse's average conductance during steady spiking and a non-spiking synapse's conductance. The models become more similar as additional spiking neurons are added to each population "node" in the network. We apply the FSA to model a neuromuscular reflex pathway two different ways: Via non-spiking components and then via spiking components. These results provide a concrete example of how a single non-spiking neuron may model the average spiking frequency of a population of spiking neurons. The resulting model also demonstrates that by using the FSA, models can be constructed that incorporate both spiking and non-spiking units. This work facilitates the construction of large networks of spiking neurons and synapses that perform specific functions, for example, those implemented with neuromorphic computing hardware, by providing an analytical method for directly tuning their parameters without time-consuming optimization or learning.
设计神经网络以执行特定任务通常在确定网络架构和参数值方面面临巨大挑战。在这项工作中,我们将先前开发的用于调整非脉冲神经元网络的方法“功能子网方法”(FSA)扩展到对由脉冲神经元组成的网络进行调整。这种扩展使得能够基于网络的预期功能直接组装和调整脉冲神经元和突触的网络,而无需使用全局优化或机器学习。为了扩展FSA,我们表明广义线性积分发放(GLIF)神经元模型的动力学与非脉冲泄漏积分器神经元模型的动力学具有基本相似性。我们推导了分析表达式,展示了以下方面的功能相似性:(1)脉冲神经元的稳态发放频率与非脉冲神经元响应施加电流时的稳态电压;(2)脉冲神经元的瞬态发放频率与非脉冲神经元响应施加电流时的瞬态电压;(3)脉冲突触在稳定发放期间的平均电导与非脉冲突触的电导。随着向网络中的每个群体“节点”添加更多的脉冲神经元,这些模型变得更加相似。我们将FSA应用于以两种不同方式对神经肌肉反射通路进行建模:通过非脉冲组件,然后通过脉冲组件。这些结果提供了一个具体示例,说明单个非脉冲神经元如何对一群脉冲神经元的平均发放频率进行建模。所得模型还表明,通过使用FSA,可以构建包含脉冲和非脉冲单元的模型。这项工作通过提供一种无需耗时优化或学习即可直接调整其参数的分析方法,促进了执行特定功能的大型脉冲神经元和突触网络的构建,例如那些用神经形态计算硬件实现的网络。