Sridar Saivimal, Qiao Zhi, Muthukrishnan Niveditha, Zhang Wenlong, Polygerinos Panagiotis
The Polytechnic School, Ira A. Fulton Schools of Engineering, Arizona State University, Mesa, AZ, United States.
School for Engineering of Matter Transport and Energy, Ira A. Fulton Schools of Engineering, Arizona State University, Tempe, AZ, United States.
Front Robot AI. 2018 May 17;5:44. doi: 10.3389/frobt.2018.00044. eCollection 2018.
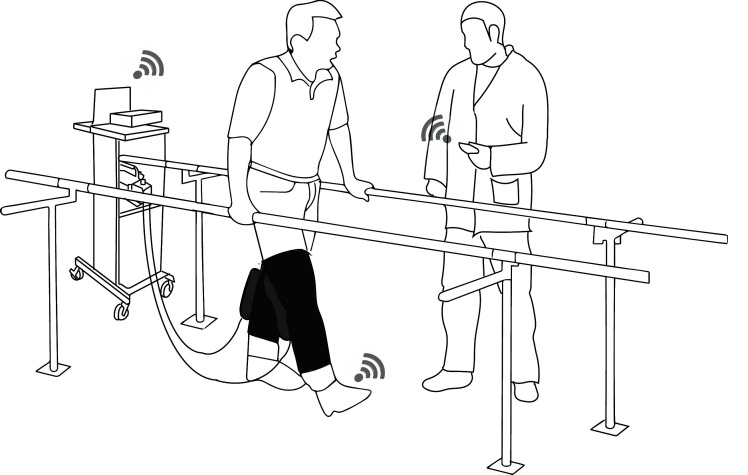
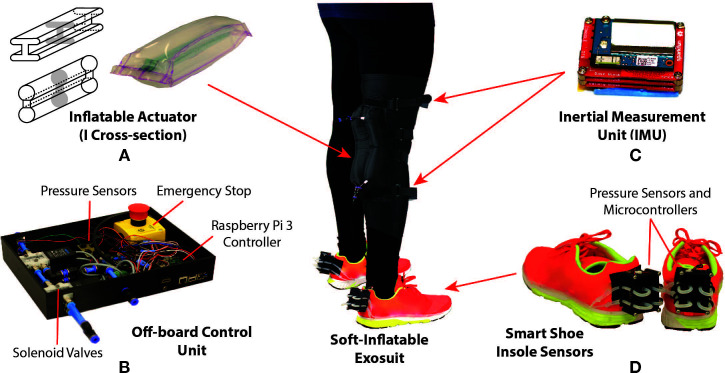
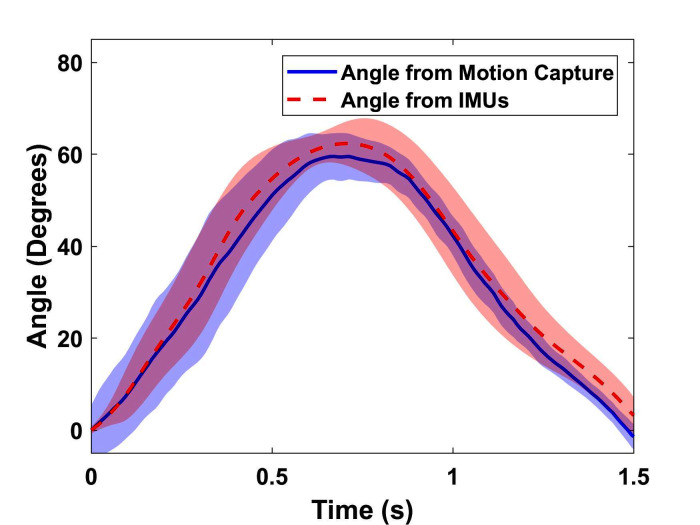
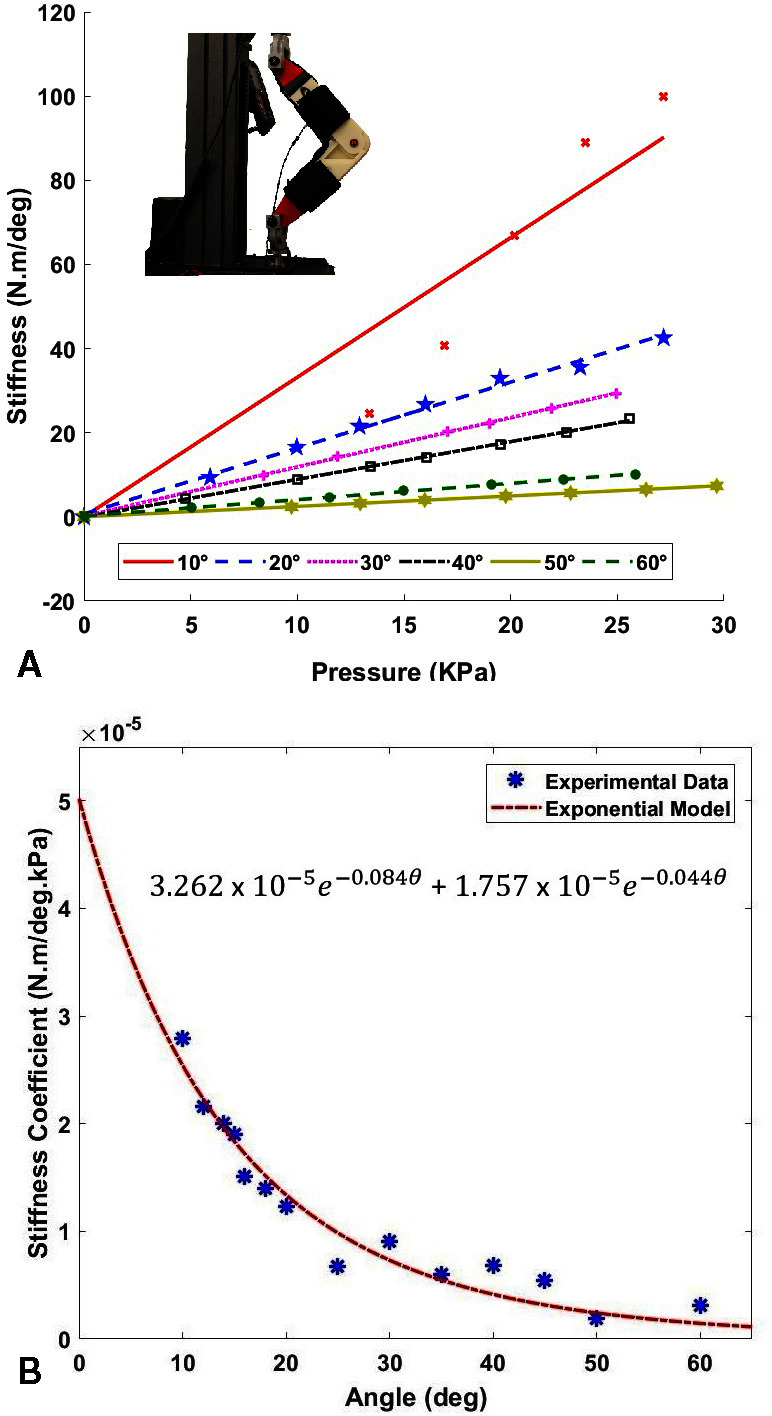
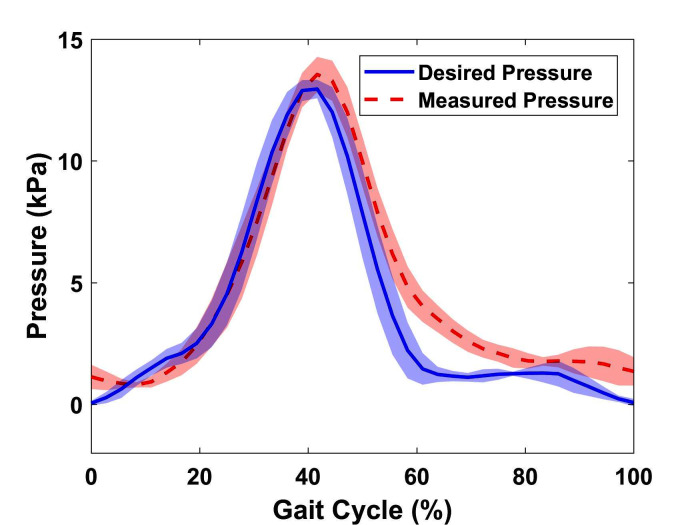
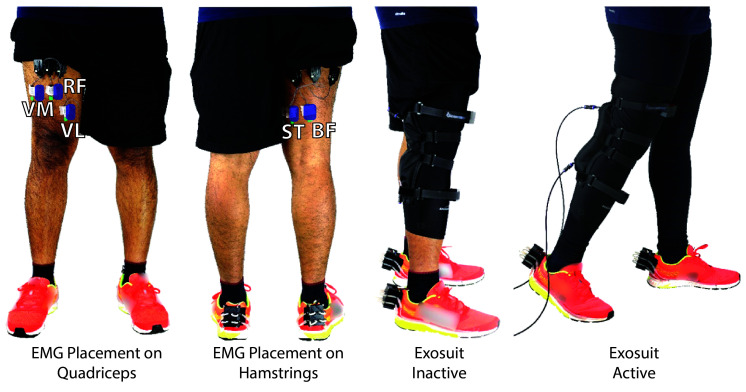
In this paper, we present a soft-inflatable exosuit to assist knee extension during gait training for stroke rehabilitation. The soft exosuit is designed to provide 25% of the knee moment required during the swing phase of the gait cycle and is integrated with inertial measurement units (IMUs) and insole sensors to improve gait phase detection and controller design. The stiffness of the knee joint during level walking is computed using inverse dynamics. The soft-inflatable actuators, with an I cross-section, are mechanically characterized at varying angles to enable generation of the required stiffness outputs. A linear relation between the inflatable actuator stiffness and internal pressure as a function of the knee angle is obtained, and a two-layer stiffness controller is implemented to assist the knee joint by providing appropriate stiffness during the swing phase. Finally, to evaluate the ability of the exosuit to assist in swing motion, surface-electromyography (sEMG) sensors are placed on the three muscle groups of the quadriceps and two groups of the hamstrings, on three healthy participants. A reduction in muscle activity of the rectus femoris, vastus lateralis, and vastus medialis is observed, which demonstrates feasibility of operation and potential future usage of the soft inflatable exosuit by impaired users.
在本文中,我们提出了一种软充气式外骨骼套装,用于在中风康复步态训练期间辅助膝关节伸展。这种软外骨骼套装旨在提供步态周期摆动阶段所需膝关节力矩的25%,并与惯性测量单元(IMU)和鞋垫传感器集成,以改善步态阶段检测和控制器设计。通过逆动力学计算水平行走时膝关节的刚度。具有I形横截面的软充气式致动器在不同角度进行了力学特性表征,以实现所需刚度输出的产生。获得了充气式致动器刚度与内部压力之间随膝关节角度变化的线性关系,并实施了两层刚度控制器,以在摆动阶段通过提供适当的刚度来辅助膝关节。最后,为了评估外骨骼套装辅助摆动运动的能力,在三名健康参与者的股四头肌三个肌肉群和腘绳肌两组上放置了表面肌电图(sEMG)传感器。观察到股直肌、股外侧肌和股内侧肌的肌肉活动减少,这证明了软充气式外骨骼套装对功能受损用户的操作可行性和潜在的未来用途。