Brain and Behaviour Lab, Dept. of Bioengineering, Imperial College London, London, United Kingdom.
Dept. of Computing, Imperial College London, London, United Kingdom.
PLoS One. 2021 Jan 27;16(1):e0245717. doi: 10.1371/journal.pone.0245717. eCollection 2021.
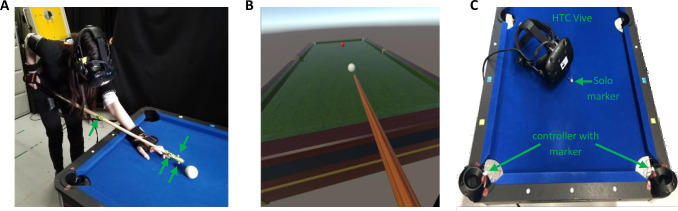
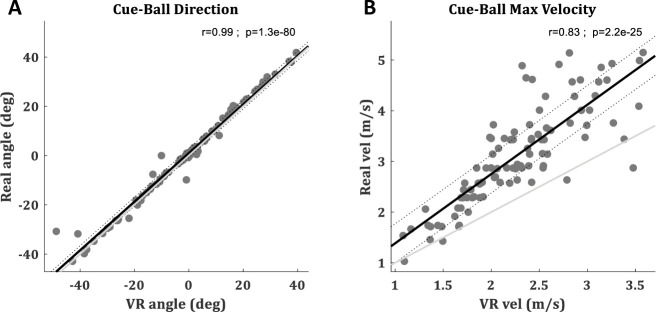
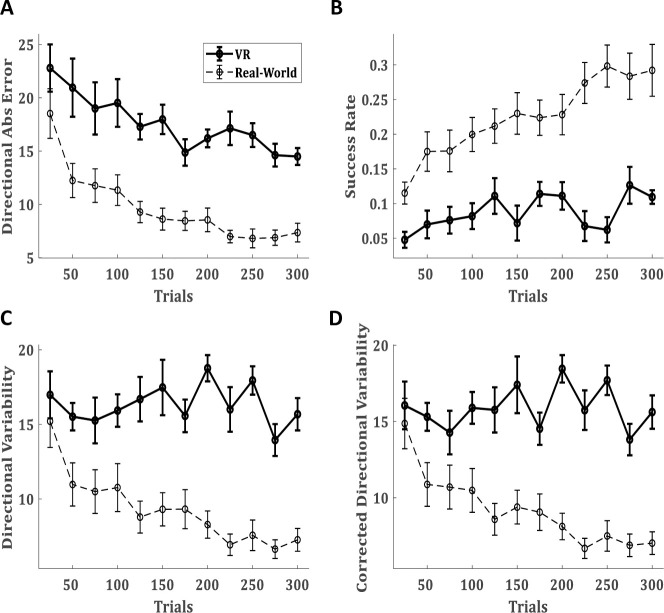
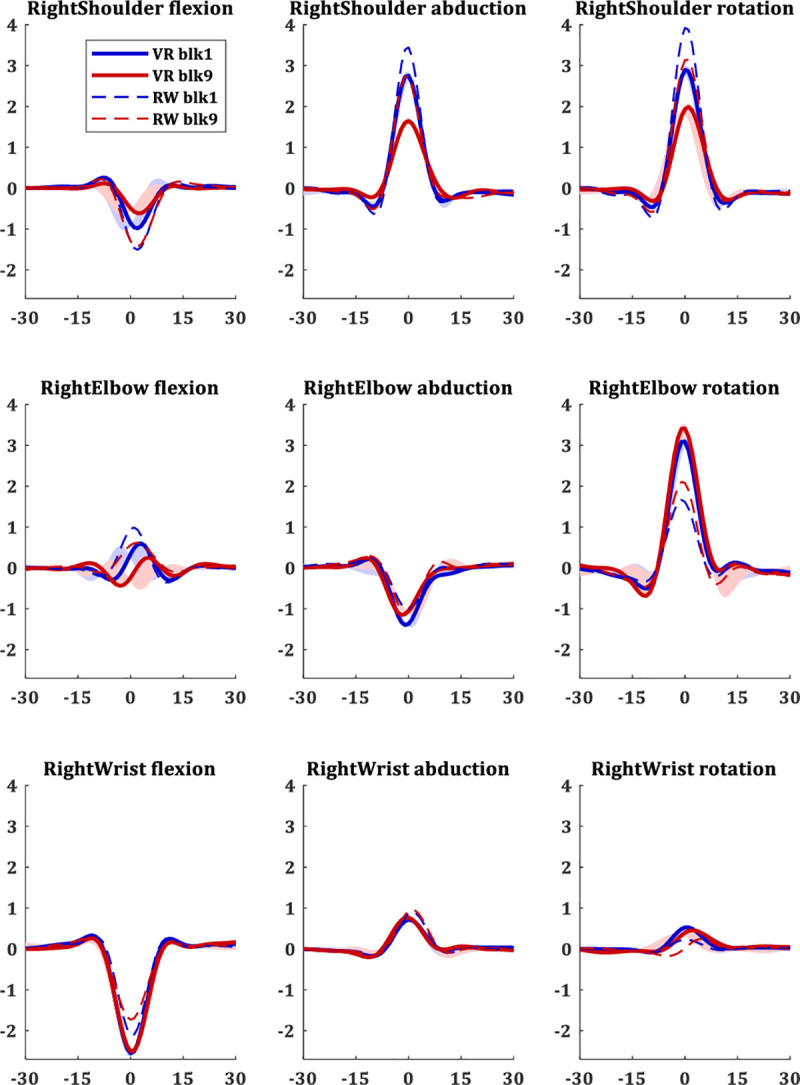
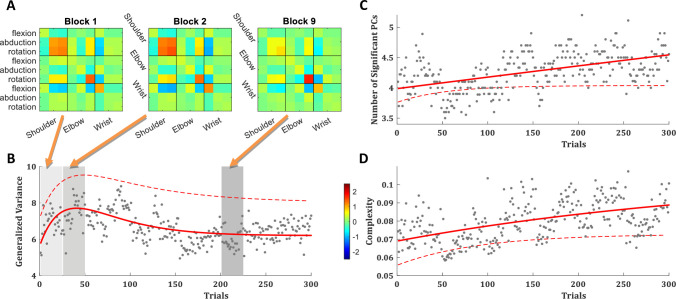
Motor-learning literature focuses on simple laboratory-tasks due to their controlled manner and the ease to apply manipulations to induce learning and adaptation. Recently, we introduced a billiards paradigm and demonstrated the feasibility of real-world-neuroscience using wearables for naturalistic full-body motion-tracking and mobile-brain-imaging. Here we developed an embodied virtual-reality (VR) environment to our real-world billiards paradigm, which allows to control the visual feedback for this complex real-world task, while maintaining sense of embodiment. The setup was validated by comparing real-world ball trajectories with the trajectories of the virtual balls, calculated by the physics engine. We then ran our short-term motor learning protocol in the embodied VR. Subjects played billiard shots when they held the physical cue and hit a physical ball on the table while seeing it all in VR. We found comparable short-term motor learning trends in the embodied VR to those we previously reported in the physical real-world task. Embodied VR can be used for learning real-world tasks in a highly controlled environment which enables applying visual manipulations, common in laboratory-tasks and rehabilitation, to a real-world full-body task. Embodied VR enables to manipulate feedback and apply perturbations to isolate and assess interactions between specific motor-learning components, thus enabling addressing the current questions of motor-learning in real-world tasks. Such a setup can potentially be used for rehabilitation, where VR is gaining popularity but the transfer to the real-world is currently limited, presumably, due to the lack of embodiment.
运动学习文献主要关注简单的实验室任务,因为这些任务的控制方式较为简单,并且易于施加操作来诱导学习和适应。最近,我们引入了一个台球范式,并展示了使用可穿戴设备进行自然全身体动跟踪和移动脑成像来进行真实世界神经科学研究的可行性。在这里,我们将现实世界的台球范式应用于实体虚拟现实(VR)环境中,这使得我们可以控制这个复杂的真实世界任务的视觉反馈,同时保持实体感。我们通过将物理引擎计算的虚拟球的轨迹与真实世界中的球的轨迹进行比较,验证了该设置的有效性。然后,我们在实体 VR 中运行了我们的短期运动学习协议。当受试者持有物理提示并在 VR 中看到球时,他们会击打台球。我们发现,在实体 VR 中,短期运动学习的趋势与我们之前在物理真实世界任务中报告的趋势相似。实体 VR 可用于在高度受控的环境中学习真实世界任务,从而可以对真实世界的全身体任务应用常见于实验室任务和康复中的视觉操作。实体 VR 可以对反馈进行操作,并施加干扰,以隔离和评估特定运动学习组件之间的相互作用,从而能够解决真实世界任务中的当前运动学习问题。这种设置可能可用于康复,因为 VR 越来越受欢迎,但目前向现实世界的转移受到限制,这可能是由于缺乏实体感。