State Key Laboratory of Automotive Safety and Energy, School of Vehicle and Mobility, Tsinghua University, Beijing, 100084, China.
Sci Rep. 2021 Feb 17;11(1):3996. doi: 10.1038/s41598-021-82331-z.
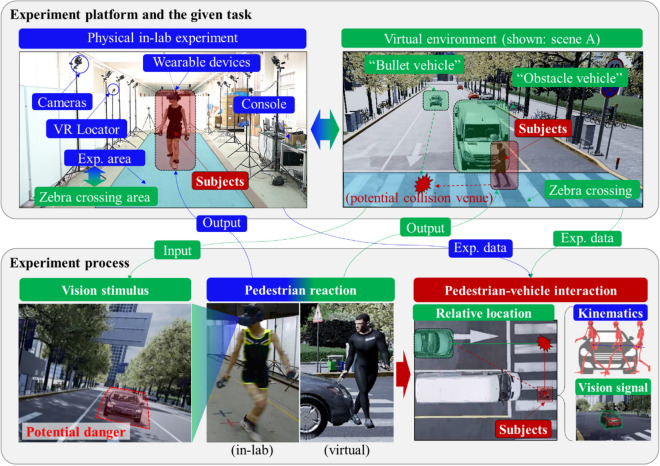
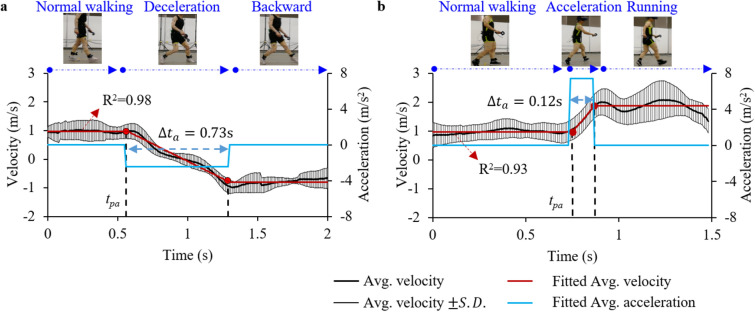
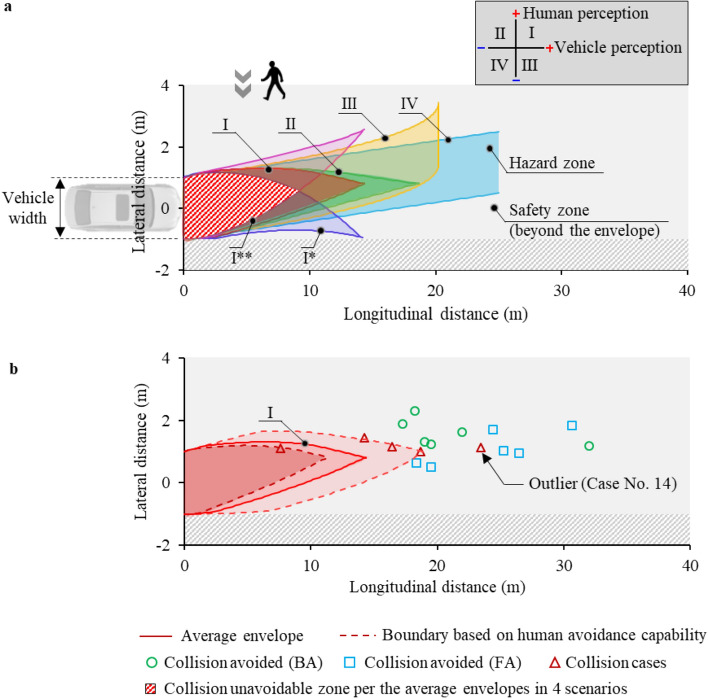
Human reaction plays a key role in improved protection upon emergent traffic situations with motor vehicles. Understanding the underlying behaviour mechanisms can combine active sensing system on feature caption and passive devices on injury mitigation for automated vehicles. The study aims to identify the distance-based safety boundary ("safety envelope") of vehicle-pedestrian conflicts via pedestrian active avoidance behaviour recorded in well-controlled, immersive virtual reality-based emergent traffic scenarios. Via physiological signal measurement and kinematics reconstruction of the complete sequence, we discovered the general perception-decision-action mechanisms under given external stimulus, and the resultant certain level of natural harm-avoidance action. Using vision as the main information source, 70% pedestrians managed to avoid the collision by adapting walking speeds and directions, consuming overall less "decision" time (0.17-0.24 s vs. 0.41 s) than the collision cases, after that, pedestrians need enough "execution" time (1.52-1.84 s) to take avoidance action. Safety envelopes were generated by combining the simultaneous interactions between the pedestrian and the vehicle. The present investigation on emergent reaction dynamics clears a way for realistic modelling of biomechanical behaviour, and preliminarily demonstrates the feasibility of incorporating in vivo pedestrian behaviour into engineering design which can facilitate improved, interactive on-board devices towards global optimal safety.
人类反应在改善突发交通情况下对机动车辆的保护方面起着关键作用。理解潜在的行为机制可以结合主动感知系统对特征描述和被动设备对自动车辆的损伤缓解。本研究旨在通过行人主动避撞行为在受控的沉浸式虚拟现实突发交通场景中记录,确定车辆-行人冲突的基于距离的安全边界(“安全包络”)。通过生理信号测量和完整序列的运动学重建,我们发现了在给定外部刺激下的一般感知-决策-行动机制,以及由此产生的一定程度的自然伤害回避行动。以视觉为主要信息源,70%的行人通过调整行走速度和方向成功避免了碰撞,总决策时间(0.17-0.24 s 与 0.41 s 相比)比碰撞情况少,之后,行人需要足够的“执行”时间(1.52-1.84 s)来采取避撞行动。安全包络通过结合行人与车辆之间的同时交互生成。对紧急反应动力学的本研究为生物力学行为的现实建模开辟了道路,并初步证明了将体内行人行为纳入工程设计的可行性,这有助于改进交互式车载设备实现全球最佳安全。