Department of Automatic Control, LTH, Lund University, 221 00 Lund, Sweden.
Instituto Universitario de Automática e Informática Industrial, Universitat Politècnica de València, 46022 València, Spain.
Sensors (Basel). 2021 Feb 23;21(4):1531. doi: 10.3390/s21041531.
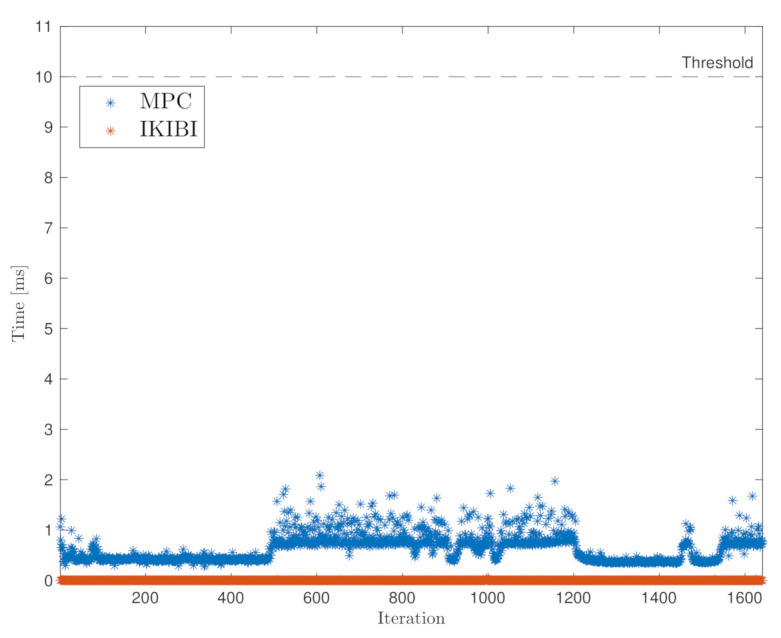
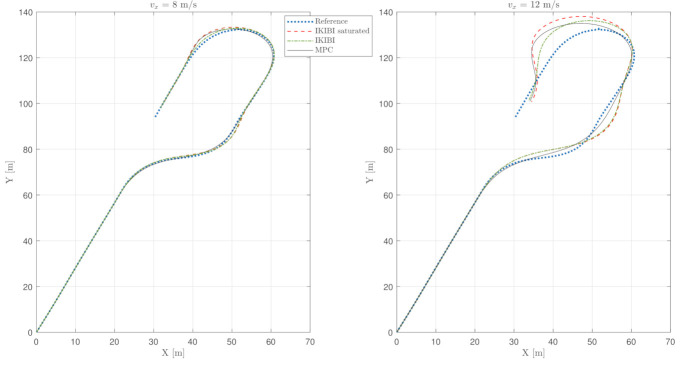
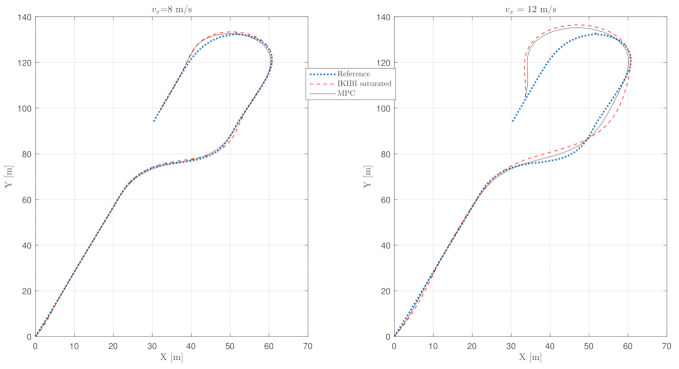
In this contribution, we suggest two proposals to achieve fast, real-time lane-keeping control for Autonomous Ground Vehicles (AGVs). The goal of lane-keeping is to orient and keep the vehicle within a given reference path using the front wheel steering angle as the control action for a specific longitudinal velocity. While nonlinear models can describe the lateral dynamics of the vehicle in an accurate manner, they might lead to difficulties when computing some control laws such as Model Predictive Control (MPC) in real time. Therefore, our first proposal is to use a Linear Parameter Varying (LPV) model to describe the AGV's lateral dynamics, as a trade-off between computational complexity and model accuracy. Additionally, AGV sensors typically work at different measurement acquisition frequencies so that Kalman Filters (KFs) are usually needed for sensor fusion. Our second proposal is to use a Dual-Rate Extended Kalman Filter (DREFKF) to alleviate the cost of updating the internal state of the filter. To check the validity of our proposals, an LPV model-based control strategy is compared in simulations over a circuit path to another reduced computational complexity control strategy, the Inverse Kinematic Bicycle model (IKIBI), in the presence of process and measurement Gaussian noise. The LPV-MPC controller is shown to provide a more accurate lane-keeping behavior than an IKIBI control strategy. Finally, it is seen that Dual-Rate Extended Kalman Filters (DREKFs) constitute an interesting tool for providing fast vehicle state estimation in an AGV lane-keeping application.
在本贡献中,我们提出了两种建议,以实现自主地面车辆(AGV)的快速实时车道保持控制。车道保持的目标是使用前轮转向角作为特定纵向速度的控制动作,使车辆在给定参考路径上定向并保持在该路径内。虽然非线性模型可以准确地描述车辆的横向动力学,但在计算某些控制律(如模型预测控制(MPC))时可能会遇到困难。因此,我们的第一个建议是使用线性参数时变(LPV)模型来描述 AGV 的横向动力学,作为计算复杂性和模型准确性之间的折衷。此外,AGV 传感器通常在不同的测量采集频率下工作,因此通常需要卡尔曼滤波器(KF)进行传感器融合。我们的第二个建议是使用双率扩展卡尔曼滤波器(DREFKF)来减轻滤波器内部状态更新的成本。为了检查我们的建议的有效性,在存在过程和测量高斯噪声的情况下,将基于 LPV 模型的控制策略与另一种具有较低计算复杂性的控制策略,逆运动学自行车模型(IKIBI),在电路路径上的仿真中进行了比较。结果表明,LPV-MPC 控制器比 IKIBI 控制策略提供了更精确的车道保持行为。最后,我们发现双率扩展卡尔曼滤波器(DREKF)是在 AGV 车道保持应用中提供快速车辆状态估计的一种很有前途的工具。