Jin Zhenkun, Liu Lei, Gong Dafeng, Li Lei
Department of Information Engineering, Wuhan Business University, Wuhan, China.
Graduate School, Gachon University, Seoul, South Korea.
Front Neurorobot. 2021 Feb 25;15:624466. doi: 10.3389/fnbot.2021.624466. eCollection 2021.
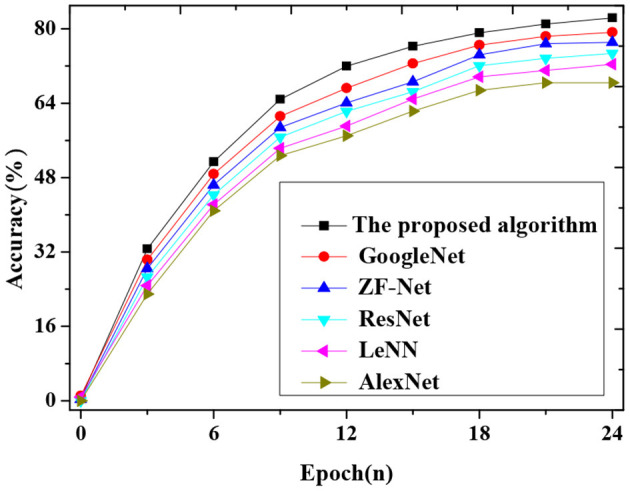
The purpose is to solve the problems of large positioning errors, low recognition speed, and low object recognition accuracy in industrial robot detection in a 5G environment. The convolutional neural network (CNN) model in the deep learning (DL) algorithm is adopted for image convolution, pooling, and target classification, optimizing the industrial robot visual recognition system in the improved method. With the bottled objects as the targets, the improved Fast-RCNN target detection model's algorithm is verified; with the small-size bottled objects in a complex environment as the targets, the improved VGG-16 classification network on the Hyper-Column scheme is verified. Finally, the algorithm constructed by the simulation analysis is compared with other advanced CNN algorithms. The results show that both the Fast RCN algorithm and the improved VGG-16 classification network based on the Hyper-Column scheme can position and recognize the targets with a recognition accuracy rate of 82.34%, significantly better than other advanced neural network algorithms. Therefore, the improved VGG-16 classification network based on the Hyper-Column scheme has good accuracy and effectiveness for target recognition and positioning, providing an experimental reference for industrial robots' application and development.
目的是解决5G环境下工业机器人检测中定位误差大、识别速度慢和目标识别准确率低的问题。采用深度学习(DL)算法中的卷积神经网络(CNN)模型进行图像卷积、池化和目标分类,用改进方法优化工业机器人视觉识别系统。以瓶装物体为目标,验证了改进的Fast-RCNN目标检测模型算法;以复杂环境中的小尺寸瓶装物体为目标,验证了基于超列方案的改进VGG-16分类网络。最后,将通过仿真分析构建的算法与其他先进的CNN算法进行比较。结果表明,Fast RCN算法和基于超列方案的改进VGG-16分类网络都能对目标进行定位和识别,识别准确率达82.34%,明显优于其他先进的神经网络算法。因此,基于超列方案的改进VGG-16分类网络在目标识别和定位方面具有良好的准确性和有效性,为工业机器人的应用和发展提供了实验参考。