Physical Intelligence Department, Max Planck Institute for Intelligent Systems, 70569 Stuttgart, Germany.
Institute for Biomedical Engineering, Eidgenössische Technische Hochschule Zurich, 8092 Zurich, Switzerland.
Proc Natl Acad Sci U S A. 2021 Mar 30;118(13). doi: 10.1073/pnas.2022090118.
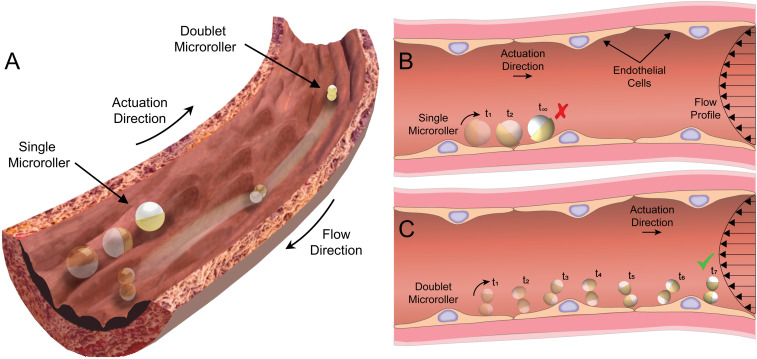
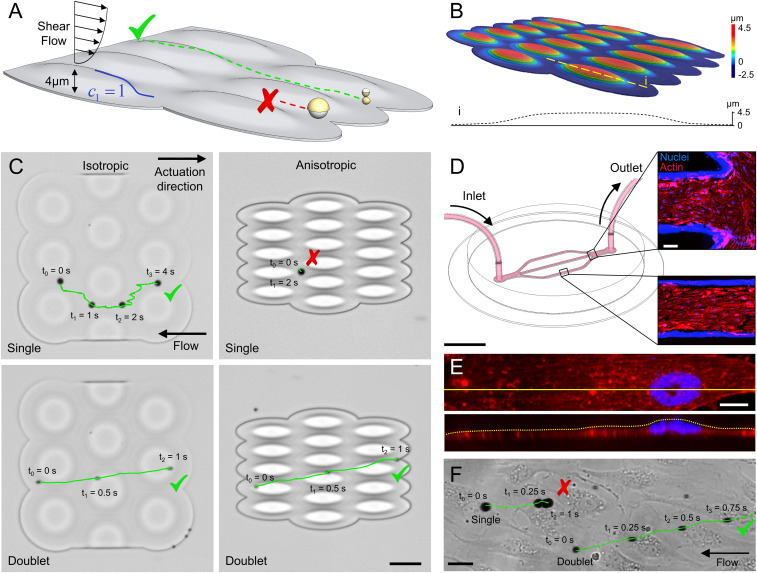
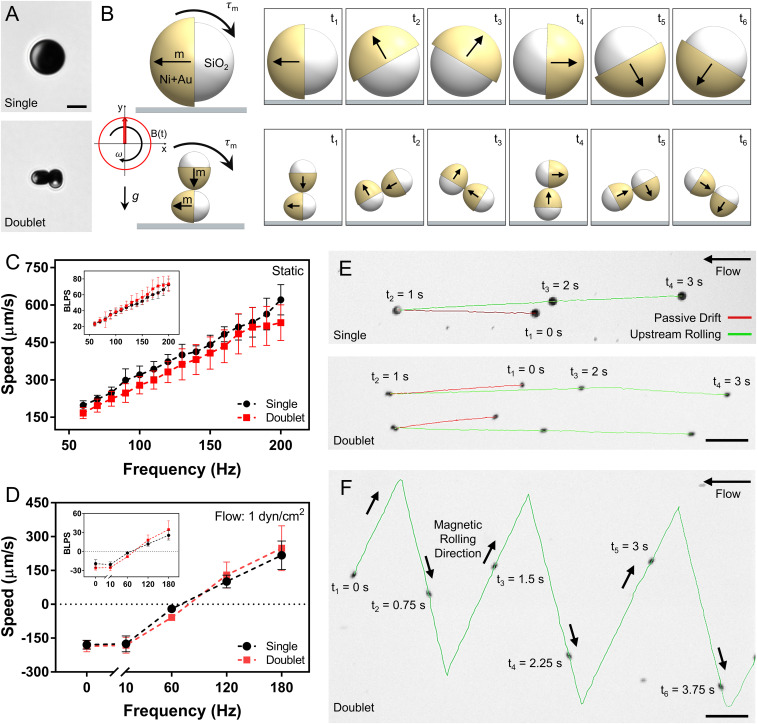
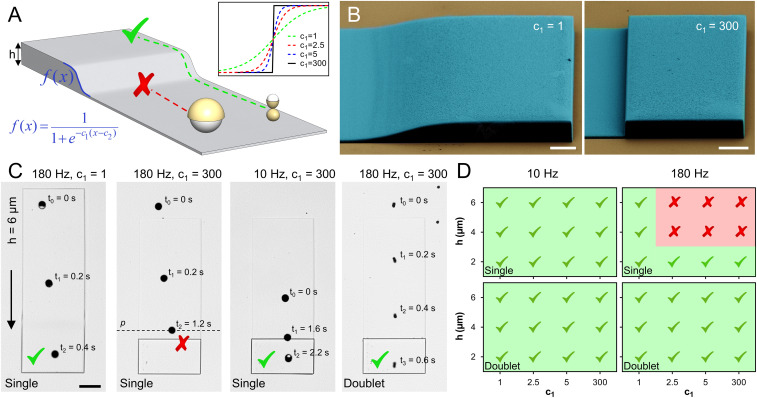
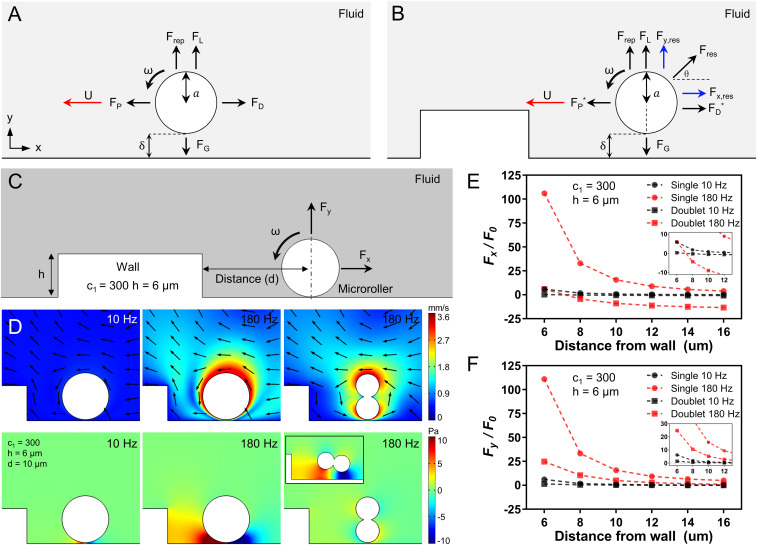
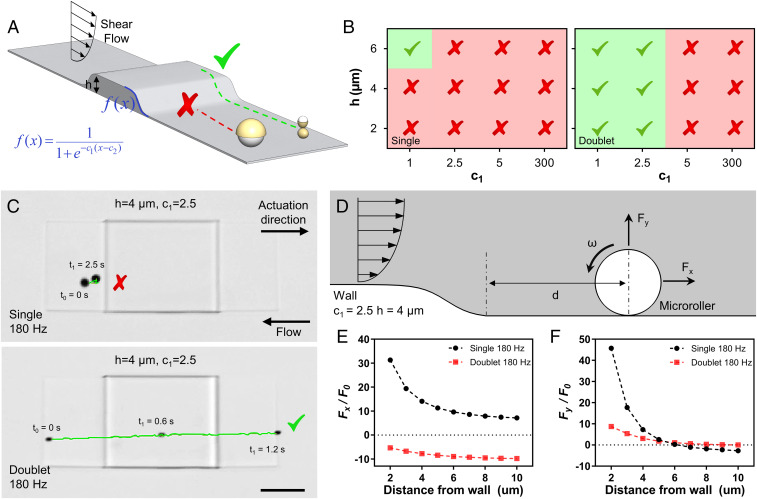
Surface microrollers are promising microrobotic systems for controlled navigation in the circulatory system thanks to their fast speeds and decreased flow velocities at the vessel walls. While surface propulsion on the vessel walls helps minimize the effect of strong fluidic forces, three-dimensional (3D) surface microtopography, comparable to the size scale of a microrobot, due to cellular morphology and organization emerges as a major challenge. Here, we show that microroller shape anisotropy determines the surface locomotion capability of microrollers on vessel-like 3D surface microtopographies against physiological flow conditions. The isotropic (single, 8.5 µm diameter spherical particle) and anisotropic (doublet, two 4 µm diameter spherical particle chain) magnetic microrollers generated similar translational velocities on flat surfaces, whereas the isotropic microrollers failed to translate on most of the 3D-printed vessel-like microtopographies. The computational fluid dynamics analyses revealed larger flow fields generated around isotropic microrollers causing larger resistive forces near the microtopographies, in comparison to anisotropic microrollers, and impairing their translation. The superior surface-rolling capability of the anisotropic doublet microrollers on microtopographical surfaces against the fluid flow was further validated in a vessel-on-a-chip system mimicking microvasculature. The findings reported here establish the design principles of surface microrollers for robust locomotion on vessel walls against physiological flows.
表面微滚轮是一种有前途的微机器人系统,由于其速度快,且在血管壁处的流速降低,因此可在循环系统中进行受控导航。虽然在血管壁上的表面推进有助于最大限度地减少强流体力的影响,但由于细胞形态和组织,与微机器人尺寸相当的三维(3D)表面微形貌成为主要挑战。在这里,我们表明微滚轮的形状各向异性决定了微滚轮在类似于血管的 3D 表面微形貌上的表面运动能力,以抵抗生理流动条件。各向同性(单个,8.5 µm 直径的球形颗粒)和各向异性(双体,两个 4 µm 直径的球形颗粒链)磁性微滚轮在平坦表面上产生相似的平移速度,而各向同性微滚轮无法在大多数 3D 打印的类似血管的微形貌上平移。计算流体动力学分析表明,各向同性微滚轮周围会产生更大的流场,导致微形貌附近的阻力更大,与各向异性微滚轮相比,从而损害了它们的平移。在模拟微血管的芯片上血管系统中,进一步验证了各向异性双体微滚轮在微形貌表面上对流体流动具有优越的表面滚动能力。这里报道的研究结果为表面微滚轮在生理流动条件下在血管壁上进行稳健运动建立了设计原则。