Kim Jeongeun, Kim Sukwha, Kim Seongheui, Lee Euehun, Heo Yoonjeong, Hwang Cheol-Yong, Choi Yun-Young, Kong Hyoun-Joong, Ryu Hyeongju, Lee Hyeongsuk
Research Institute of Nursing Science, Seoul National University, Seoul, Republic of Korea.
Department of Reconstructive Plastic Surgery, Medical Big Data Research Center, Seoul National University College of Medicine, Seoul, Republic of Korea.
Intell Serv Robot. 2021;14(5):729-739. doi: 10.1007/s11370-021-00394-3. Epub 2021 Nov 16.
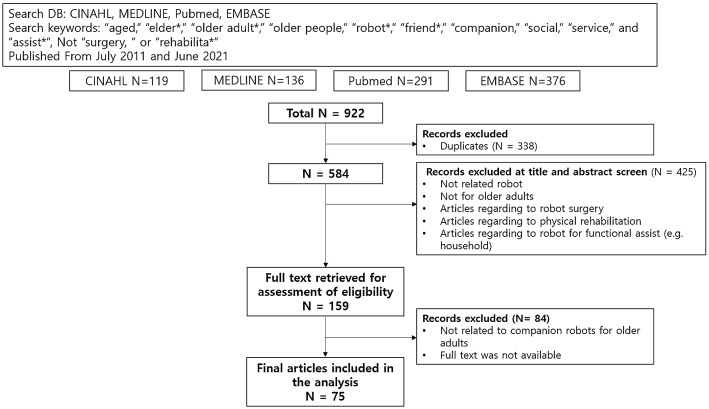
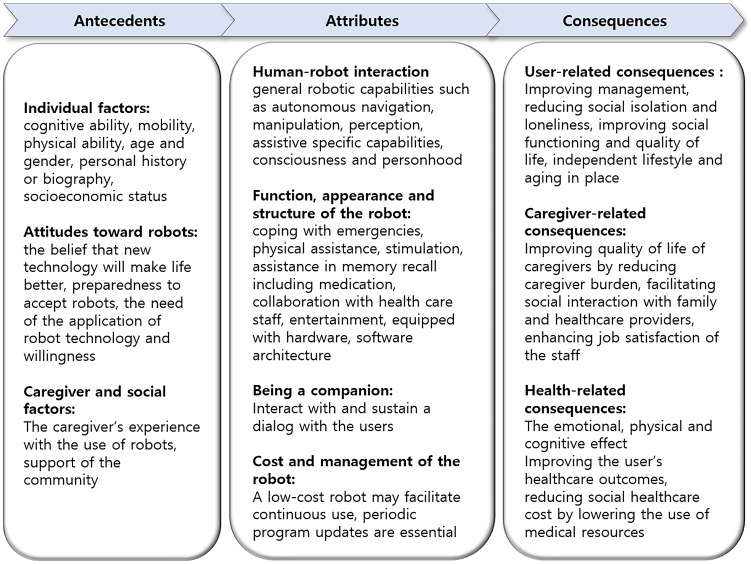
This study aims to analyze the concept of companion robots for older adults from the perspective of nursing. This study employed a concept analysis. The literature from July 2011 to June 2021 was sought from databases using specific keywords. Any quantitative or qualitative study published in English or Korean focusing on companion robots for older adults was included in the study. Rodgers' evolutionary concept analysis was used to clarify the antecedents, attributes, and consequences. Seventy-five eligible articles were studied. The findings were categorized into antecedents, attributes, and consequences. Companion robot antecedents were classified into individual factors, attitude toward robots, and caregiver and social factors. The defining attributes included human-robot interaction, function, features, structure, cost, and management of the robot being a companion. Consequences were categorized into user, caregiver, and health related. Companion robots are designed to enhance well-being, quality of life, and independence by providing service and companionship and assisting daily life. This mainly includes cognitive and social support, mobility support, relaxation, health monitoring, and self-care support through human-robot interaction. The attributes, antecedents, and consequences of companion robots identified in this study can inform future decision making and interventions by caregivers for aging in place.
本研究旨在从护理角度分析针对老年人的陪伴机器人的概念。本研究采用了概念分析法。通过使用特定关键词从数据库中检索2011年7月至2021年6月的文献。纳入研究的是任何以英文或韩文发表的、聚焦于老年人陪伴机器人的定量或定性研究。采用罗杰斯的进化概念分析法来阐明前因、属性和后果。对75篇符合条件的文章进行了研究。研究结果被分为前因、属性和后果。陪伴机器人的前因分为个体因素、对机器人的态度以及照顾者和社会因素。定义属性包括人机交互、功能、特征、结构、成本以及作为陪伴者的机器人的管理。后果分为与用户、照顾者和健康相关的方面。陪伴机器人旨在通过提供服务和陪伴以及协助日常生活来提高幸福感、生活质量和独立性。这主要包括通过人机交互提供认知和社会支持、行动支持、放松、健康监测和自我护理支持。本研究中确定的陪伴机器人的属性、前因和后果可为照顾者未来关于原地养老的决策和干预提供参考。