Acoustic Science and Technology Laboratory, Harbin Engineering University, Harbin 150001, China.
Key Laboratory of Marine Information Acquisition and Security, Harbin Engineering University, Ministry of Industry and Information Technology, Harbin 150001, China.
Sensors (Basel). 2022 Jun 21;22(13):4657. doi: 10.3390/s22134657.
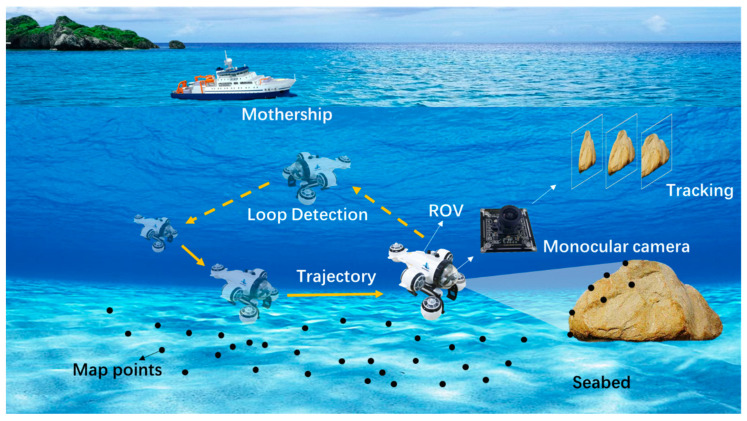
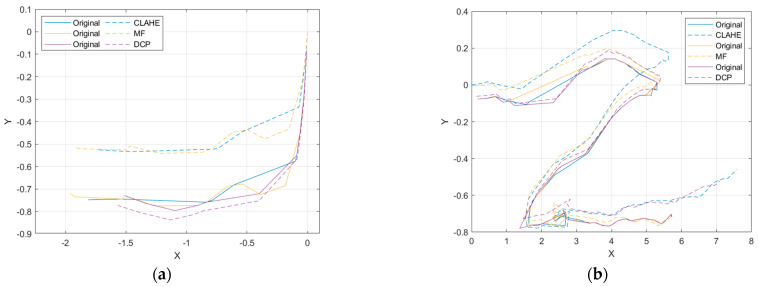
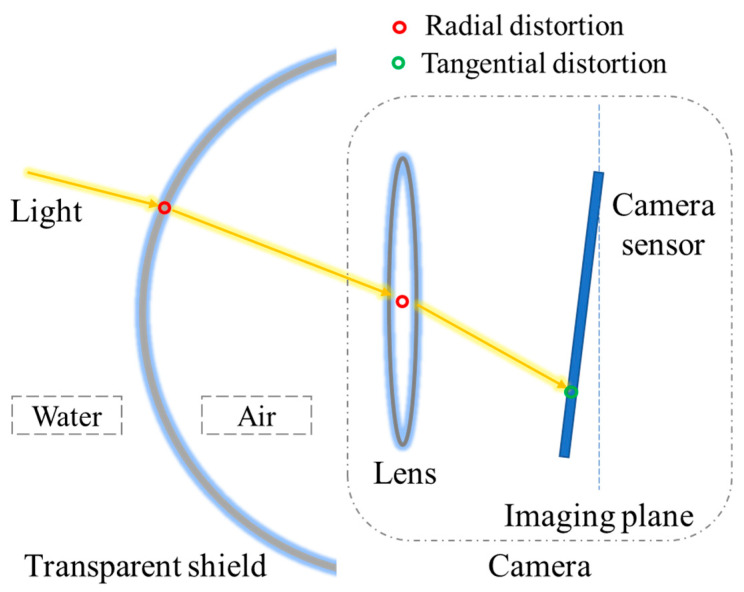
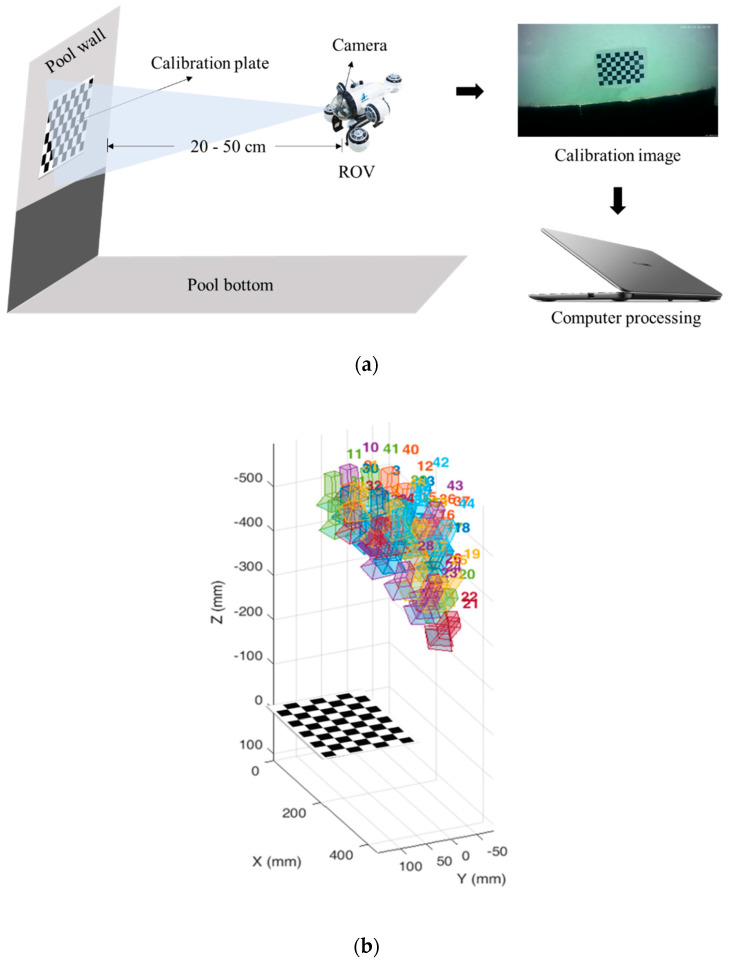
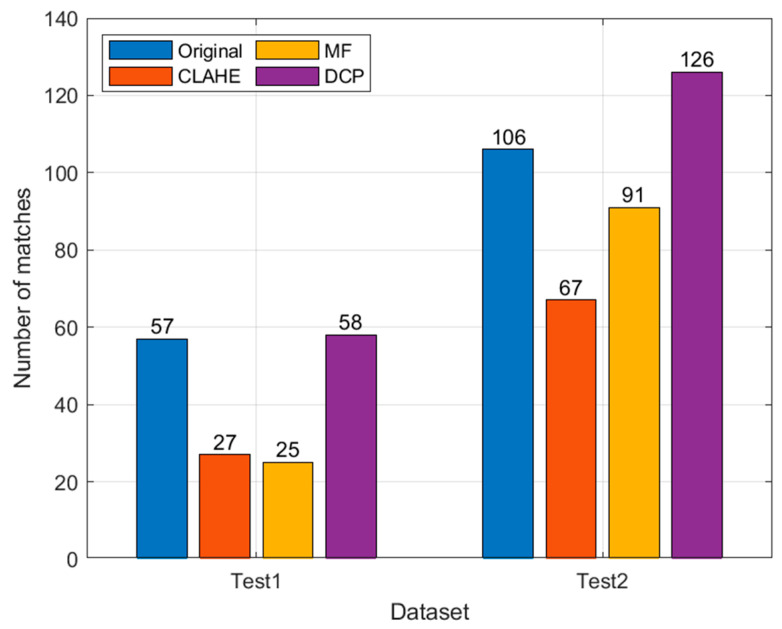
With the development of artificial intelligence technology, visual simultaneous localization and mapping (SLAM) has become a cheap and efficient localization method for underwater robots. However, there are many problems in underwater visual SLAM, such as more serious underwater imaging distortion, more underwater noise, and unclear details. In this paper, we study these two problems and chooses the ORB-SLAM2 algorithm as the method to obtain the motion trajectory of the underwater robot. The causes of radial distortion and tangential distortion of underwater cameras are analyzed, a distortion correction model is constructed, and five distortion correction coefficients are obtained through pool experiments. Comparing the performances of contrast-limited adaptive histogram equalization (CLAHE), median filtering (MF), and dark channel prior (DCP) image enhancement methods in underwater SLAM, it is found that the DCP method has the best image effect evaluation, the largest number of oriented fast and rotated brief (ORB) feature matching, and the highest localization trajectory accuracy. The results show that the ORB-SLAM2 algorithm can effectively locate the underwater robot, and the correct distortion correction coefficient and DCP improve the stability and accuracy of the ORB-SLAM2 algorithm.
随着人工智能技术的发展,视觉同时定位与建图(SLAM)已成为水下机器人的一种廉价高效的定位方法。然而,水下视觉 SLAM 存在许多问题,例如更严重的水下成像失真、更多的水下噪声以及不清晰的细节。本文针对这两个问题展开研究,选择 ORB-SLAM2 算法作为获取水下机器人运动轨迹的方法。分析了水下相机径向和切向失真的原因,建立了失真校正模型,并通过水池实验得到了五个失真校正系数。比较了对比度受限自适应直方图均衡化(CLAHE)、中值滤波(MF)和暗通道先验(DCP)三种水下 SLAM 图像增强方法的性能,发现 DCP 方法具有最佳的图像效果评价、最大的定向快速旋转布(ORB)特征匹配数量和最高的定位轨迹精度。结果表明,ORB-SLAM2 算法能有效地对水下机器人进行定位,正确的失真校正系数和 DCP 提高了 ORB-SLAM2 算法的稳定性和准确性。