Dhatt-Gauthier Kiran, Livitz Dimitri, Wu Yiyang, Bishop Kyle J M
Department of Chemical Engineering, Columbia University, New York, New York 10027, United States.
JACS Au. 2023 Mar 10;3(3):611-627. doi: 10.1021/jacsau.2c00499. eCollection 2023 Mar 27.
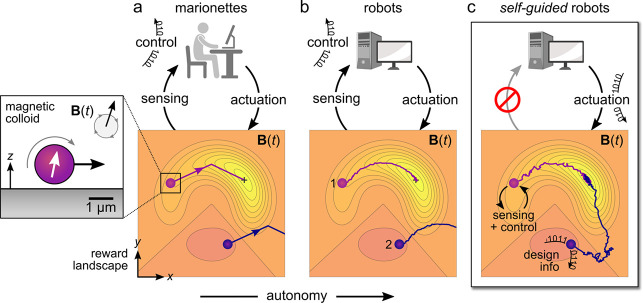
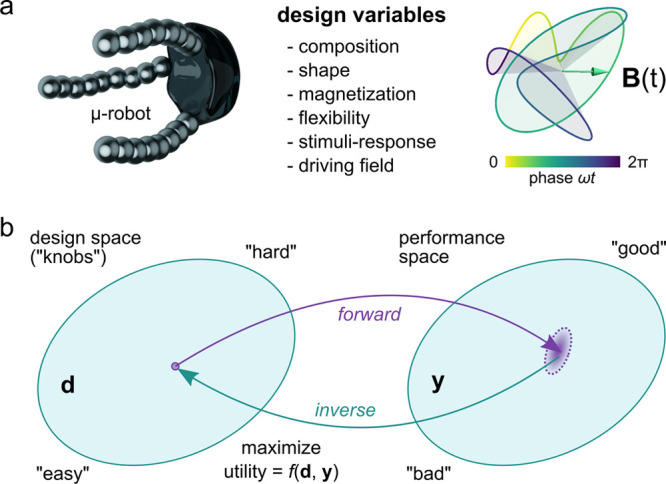
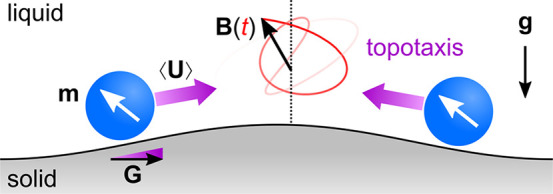
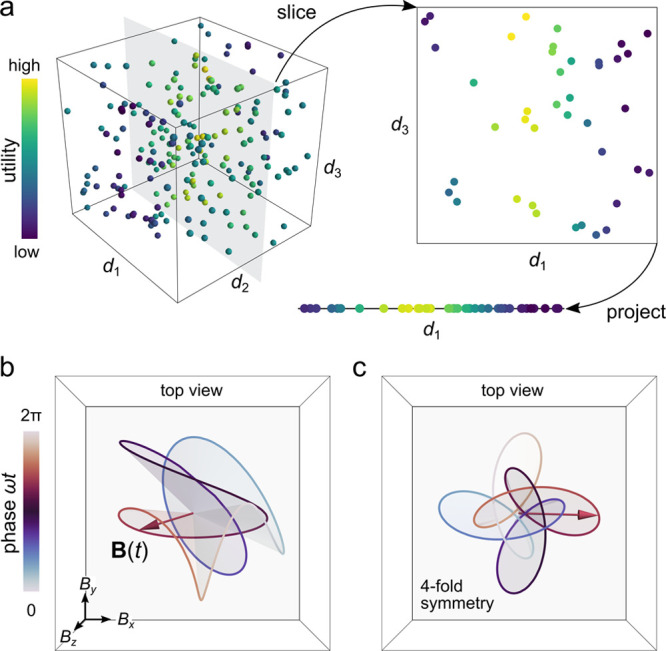
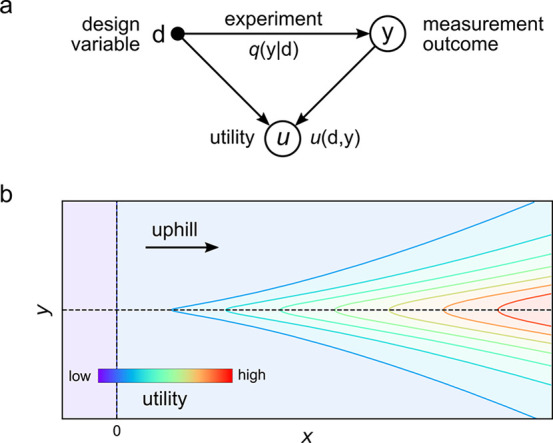
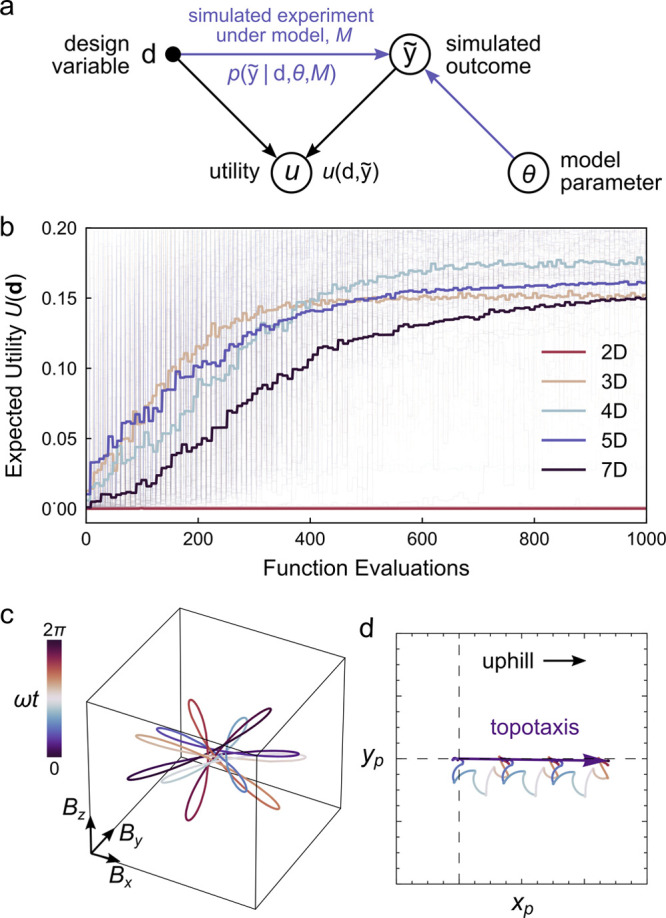
Mobile robots combine sensory information with mechanical actuation to move autonomously through structured environments and perform specific tasks. The miniaturization of such robots to the size of living cells is actively pursued for applications in biomedicine, materials science, and environmental sustainability. Existing microrobots based on field-driven particles rely on knowledge of the particle position and the target destination to control particle motion through fluid environments. Often, however, these external control strategies are challenged by limited information and global actuation where a common field directs multiple robots with unknown positions. In this Perspective, we discuss how time-varying magnetic fields can be used to encode the self-guided behaviors of magnetic particles conditioned on local environmental cues. Programming these behaviors is framed as a design problem: we seek to identify the design variables (e.g., particle shape, magnetization, elasticity, stimuli-response) that achieve the desired performance in a given environment. We discuss strategies for accelerating the design process using automated experiments, computational models, statistical inference, and machine learning approaches. Based on the current understanding of field-driven particle dynamics and existing capabilities for particle fabrication and actuation, we argue that self-guided microrobots with potentially transformative capabilities are close at hand.
移动机器人将感官信息与机械驱动相结合,以便在结构化环境中自主移动并执行特定任务。人们正在积极探索将此类机器人小型化至活细胞大小,以应用于生物医学、材料科学和环境可持续性领域。现有的基于场驱动粒子的微型机器人依靠粒子位置和目标目的地的信息来控制粒子在流体环境中的运动。然而,这些外部控制策略常常受到信息有限和全局驱动的挑战,在全局驱动中,一个共同的场会引导多个位置未知的机器人。在这篇观点文章中,我们讨论如何利用时变磁场对基于局部环境线索的磁性粒子的自引导行为进行编码。将这些行为进行编程被视为一个设计问题:我们试图确定在给定环境中实现所需性能的设计变量(例如,粒子形状、磁化强度、弹性、刺激响应)。我们讨论了使用自动化实验、计算模型、统计推断和机器学习方法来加速设计过程的策略。基于目前对场驱动粒子动力学的理解以及粒子制造和驱动的现有能力,我们认为具有潜在变革能力的自引导微型机器人即将问世。