Uneri A, Goerres J, De Silva T, Jacobson M W, Ketcha M D, Reaungamornrat S, Kleinszig G, Vogt S, Khanna A J, Wolinsky J-P, Siewerdsen J H
Computer Science, Johns Hopkins University, Baltimore, MD, USA.
Biomedical Engineering, Johns Hopkins University, Baltimore, MD, USA.
Med Image Comput Comput Assist Interv. 2016 Oct;9902:124-132. doi: 10.1007/978-3-319-46726-9_15. Epub 2016 Oct 2.
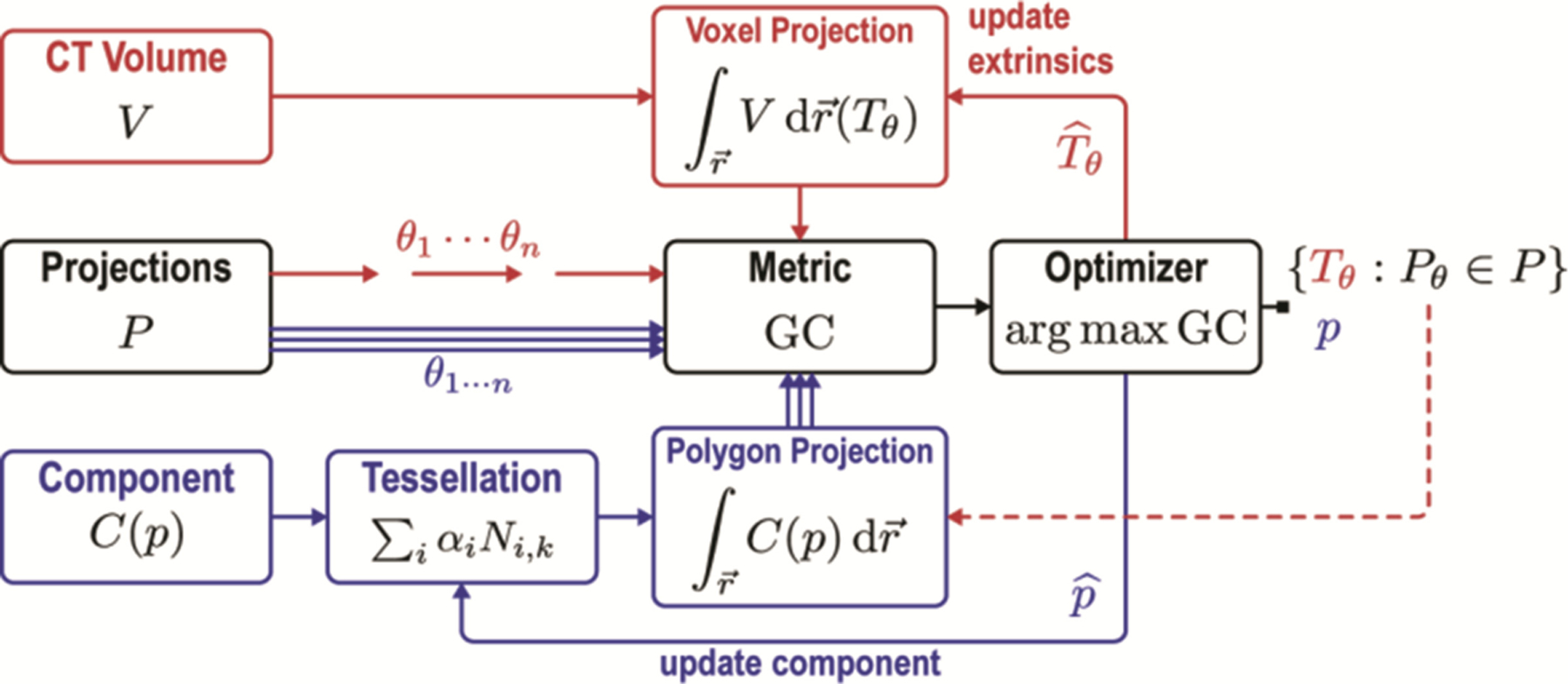
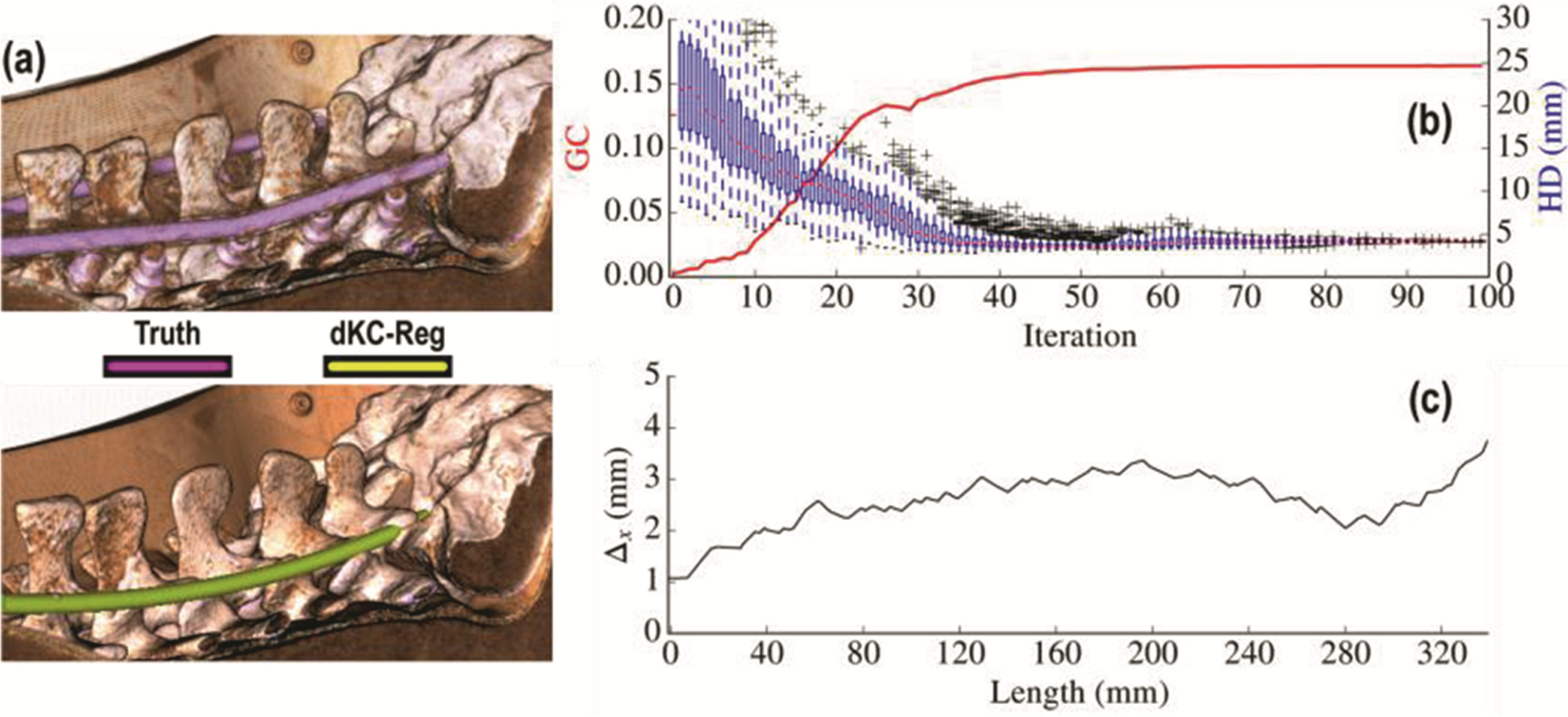
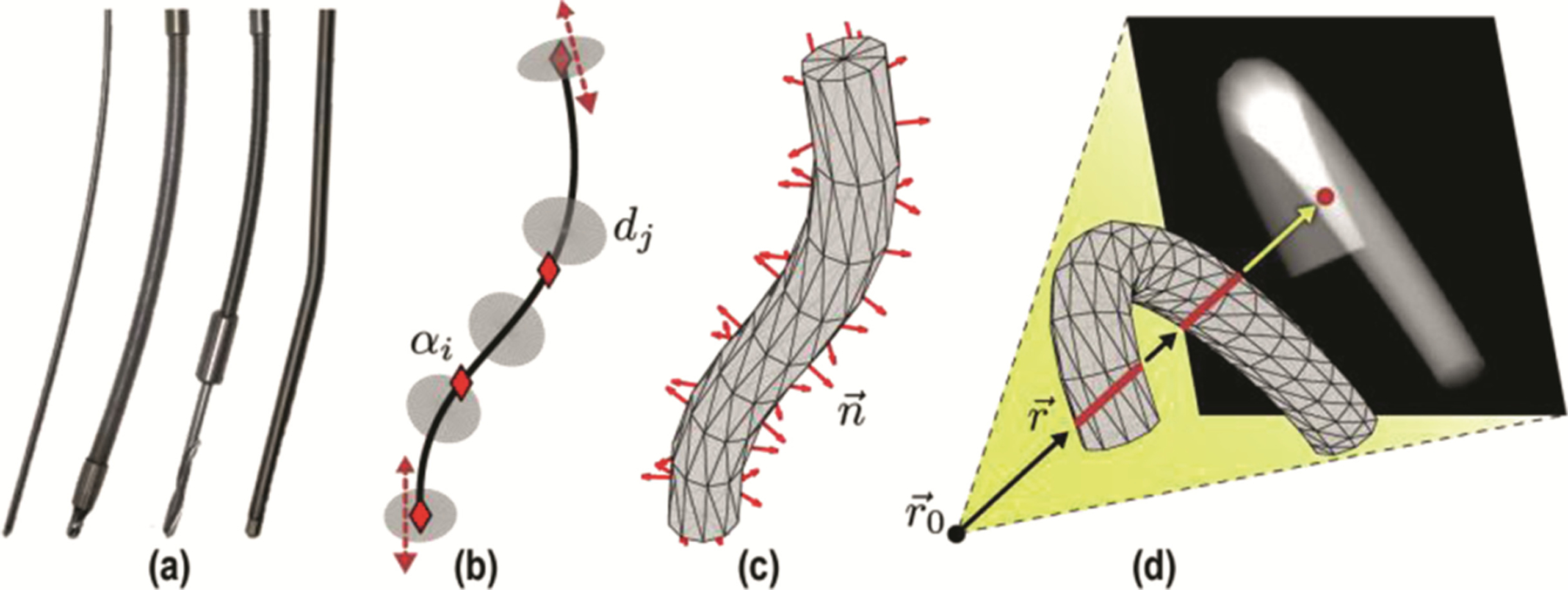
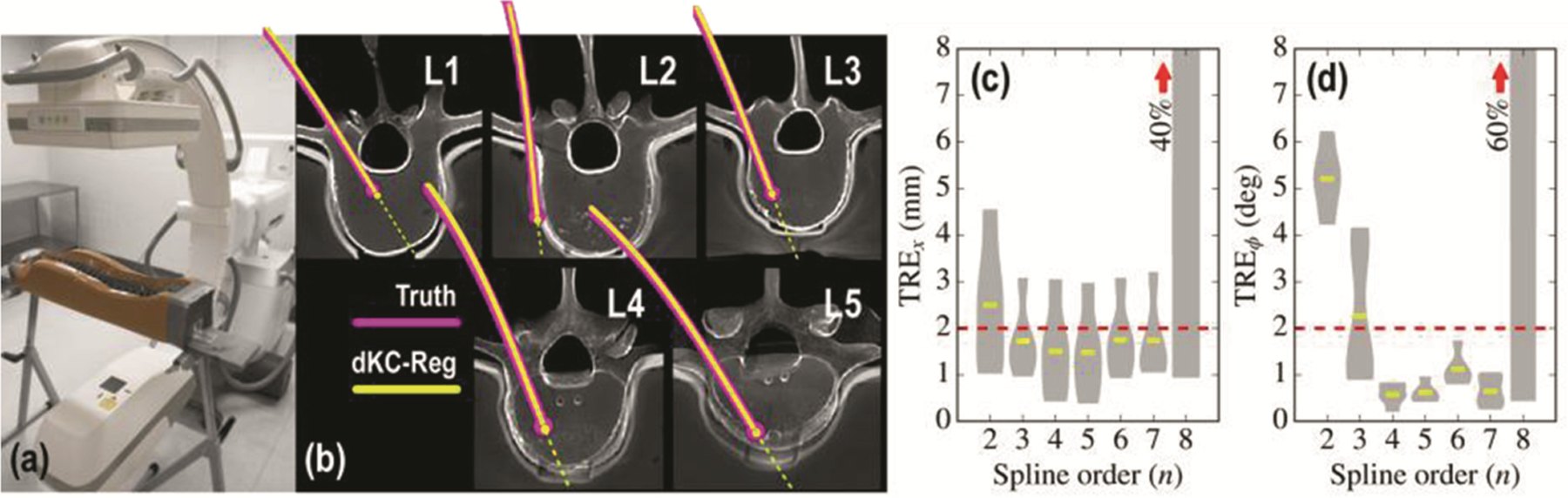
A 3D-2D image registration method is reported for guiding the placement of surgical devices (e.g., K-wires). The solution registers preoperative CT (and planning data therein) to intraoperative radiographs and computes the pose, shape, parameters of devices (termed "components") known to be in the radiographic scene. The deformable known-component registration (dKC-Reg) method was applied in experiments emulating spine surgery to register devices (K-wires and spinal fixation rods) undergoing realistic deformation. A two-stage registration process (i) resolves patient pose from individual radiographs and (ii) registers components represented as polygonal meshes based on a B-spline model. The registration result can be visualized as overlay of the component in CT analogous to surgical navigation but without conventional trackers or fiducials. Target registration error in the tip and orientation of deformable K-wires was and , respectively. For spinal fixation rods, the registered components achieved Hausdorff distance of 3.4 mm. Future work includes testing in cadaver and clinical data and extension to more generalized deformation and component models.
本文报道了一种用于引导手术器械(如克氏针)放置的三维-二维图像配准方法。该方法将术前CT(及其中的规划数据)与术中X光片进行配准,并计算已知位于X光场景中的器械(称为“部件”)的位姿、形状和参数。在模拟脊柱手术的实验中应用了可变形已知部件配准(dKC-Reg)方法,以配准经历实际变形的器械(克氏针和脊柱固定棒)。两阶段配准过程:(i)从单张X光片中解析患者位姿,(ii)基于B样条模型配准表示为多边形网格的部件。配准结果可如同手术导航一样在CT中以部件叠加的形式可视化,但无需传统的跟踪器或基准标记。可变形克氏针尖端和方向的目标配准误差分别为 和 。对于脊柱固定棒,配准后的部件实现了3.4毫米的豪斯多夫距离。未来的工作包括在尸体和临床数据上进行测试,并扩展到更广义的变形和部件模型。