Department of Biomedical Engineering, The City College of New York, New York, NY 10031, USA.
Department of Mechanical Engineering, Columbia University, New York, NY 10027, USA.
Sensors (Basel). 2023 Jun 28;23(13):5996. doi: 10.3390/s23135996.
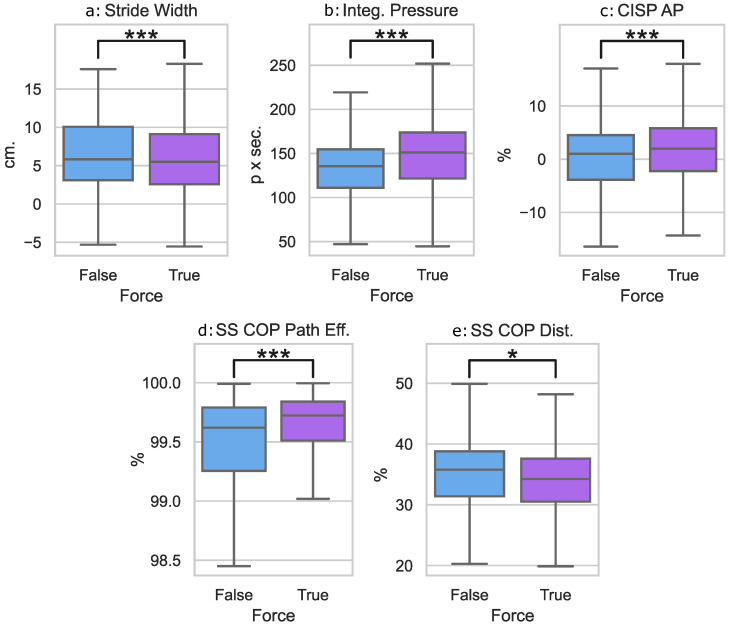
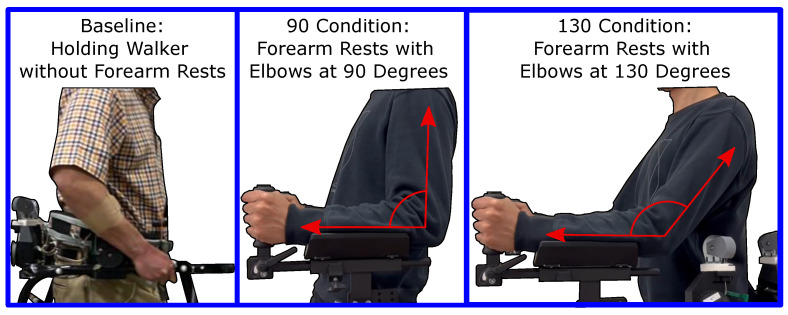
While walkers are used as mobility aids for different gait impairments, little is known about the factors that affect the performance of such aids. Therefore, we investigated the impact of arm-holding conditions on gait stability and muscle activation. We used surface electromyography (sEMG) sensors on specific arm and leg muscles while the users took laps with a robotic walker, the mobile Tethered Pelvic Assist Device (mTPAD), on an instrumented mat. Eleven participants without gait disorders walked with and without a 10% body weight (BW) force applied on the pelvis in the following three configurations: (i) while gripping the walker's frame, (ii) while using an armrest with their arms at a 90∘ angle, and (iii) while using an armrest with their arms at a 130∘ angle for 5 min each. Our results showed that when applying a force, the users changed their gait to increase stability. We also discovered differences in muscle activation based on the user's specific arm conditions. Specifically, the 130∘ condition required the least muscle activation, while gripping the walker's frame increased specific muscle activation compared to 90∘ and 130∘. This study is the first to evaluate how arm-holding and external loading conditions alter gait and muscle activations using the mTPAD.
虽然助行器被用作不同步态障碍的移动辅助工具,但对于影响这些辅助工具性能的因素知之甚少。因此,我们研究了手臂握持条件对步态稳定性和肌肉激活的影响。我们在特定的手臂和腿部肌肉上使用表面肌电图 (sEMG) 传感器,让用户在带有仪器垫的机器人助行器(移动系缚式骨盆辅助装置,mTPAD)上进行 5 分钟的环行运动,同时在骨盆上施加 10%的体重 (BW) 力。11 名无步态障碍的参与者分别在以下三种情况下进行测试:(i)握持助行器框架,(ii)手臂以 90°角使用扶手,(iii)手臂以 130°角使用扶手,每种情况持续 5 分钟。我们的结果表明,当施加外力时,使用者会改变步态以增加稳定性。我们还根据用户的特定手臂条件发现了肌肉激活的差异。具体来说,130°条件需要的肌肉激活最少,而握持助行器框架与 90°和 130°相比,增加了特定肌肉的激活。这项研究首次使用 mTPAD 评估了手臂握持和外部加载条件如何改变步态和肌肉激活。