Department of Applied Physical Sciences, University of North Carolina, Chapel Hill, NC, 27514, USA.
Department of Biomedical Engineering, University of North Carolina, Chapel Hill, NC, 27514, USA.
Nat Commun. 2024 Jun 5;15(1):4777. doi: 10.1038/s41467-024-48903-z.
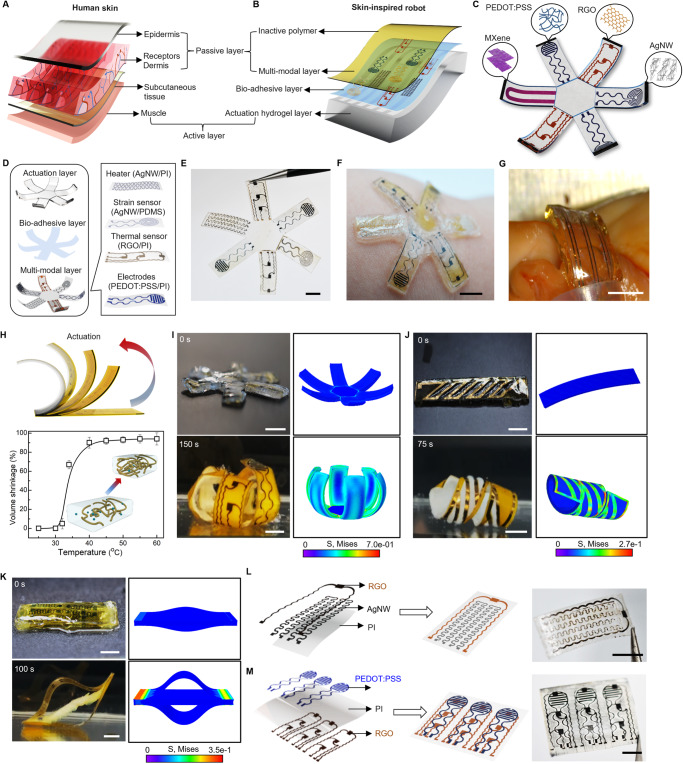
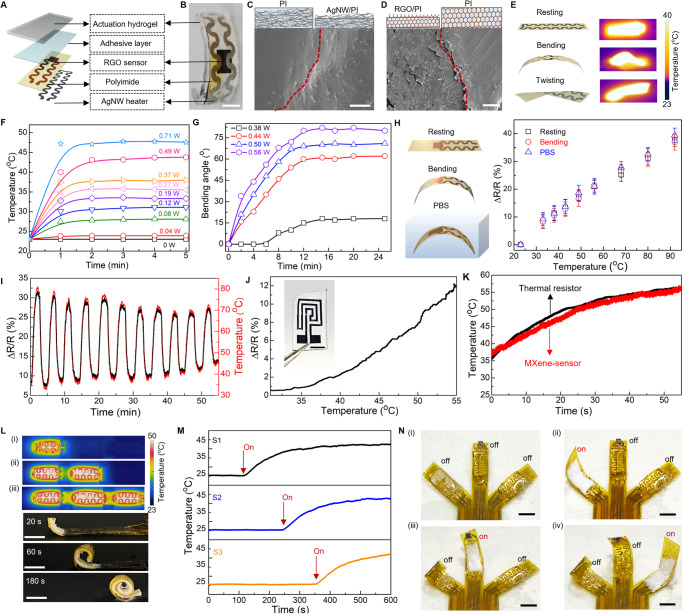
Drawing inspiration from cohesive integration of skeletal muscles and sensory skins in vertebrate animals, we present a design strategy of soft robots, primarily consisting of an electronic skin (e-skin) and an artificial muscle. These robots integrate multifunctional sensing and on-demand actuation into a biocompatible platform using an in-situ solution-based method. They feature biomimetic designs that enable adaptive motions and stress-free contact with tissues, supported by a battery-free wireless module for untethered operation. Demonstrations range from a robotic cuff for detecting blood pressure, to a robotic gripper for tracking bladder volume, an ingestible robot for pH sensing and on-site drug delivery, and a robotic patch for quantifying cardiac function and delivering electrotherapy, highlighting the application versatilities and potentials of the bio-inspired soft robots. Our designs establish a universal strategy with a broad range of sensing and responsive materials, to form integrated soft robots for medical technology and beyond.
受脊椎动物中骨骼肌肉和感觉皮肤的紧密整合的启发,我们提出了一种软机器人的设计策略,主要由电子皮肤(e-skin)和人工肌肉组成。这些机器人使用原位溶液法将多功能传感和按需致动集成到一个生物相容性平台中。它们采用仿生设计,支持自适应运动和与组织的无压力接触,并配备了无需电池的无线模块,实现了无束缚操作。演示包括用于检测血压的机器人袖带、用于跟踪膀胱容量的机器人夹具、用于 pH 感测和现场药物输送的可摄入机器人,以及用于量化心脏功能和进行电疗的机器人贴片,突出了生物启发软机器人的广泛应用潜力。我们的设计采用了广泛的传感和响应材料的通用策略,为医疗技术及其他领域形成了集成的软机器人。