Kinesiology Program, School of Nutrition and Health Promotion, Arizona State University, Tempe, AZ, USA.
PLoS One. 2012;7(12):e51888. doi: 10.1371/journal.pone.0051888. Epub 2012 Dec 20.
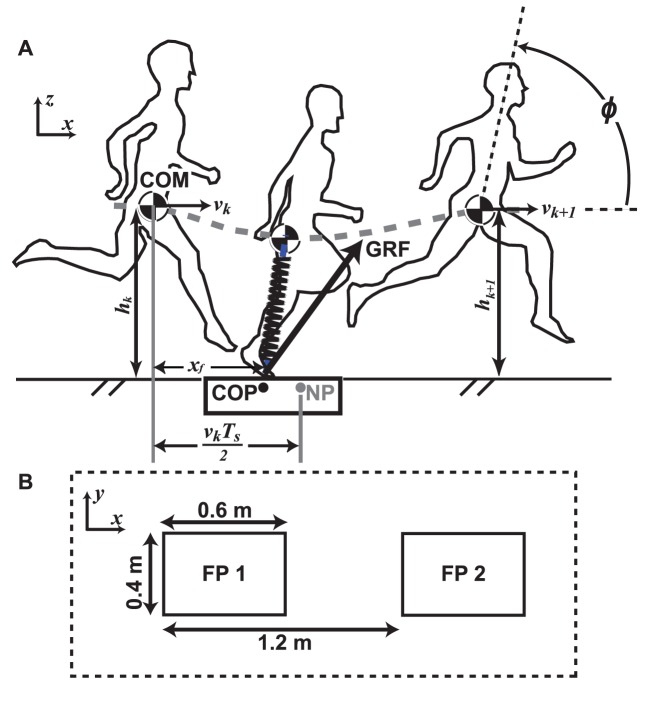
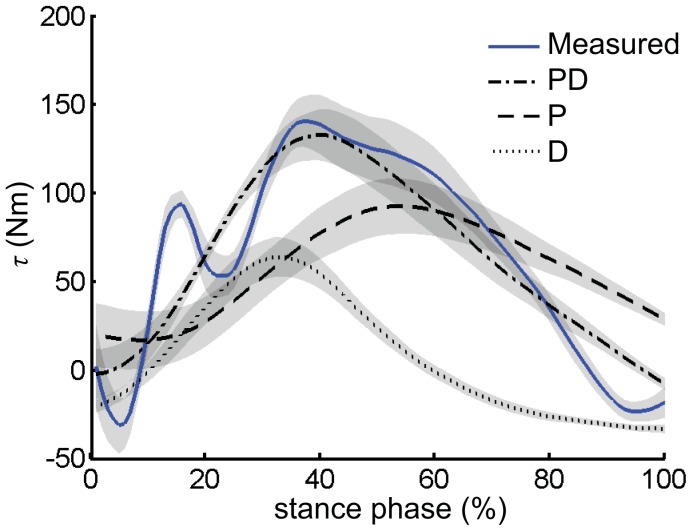
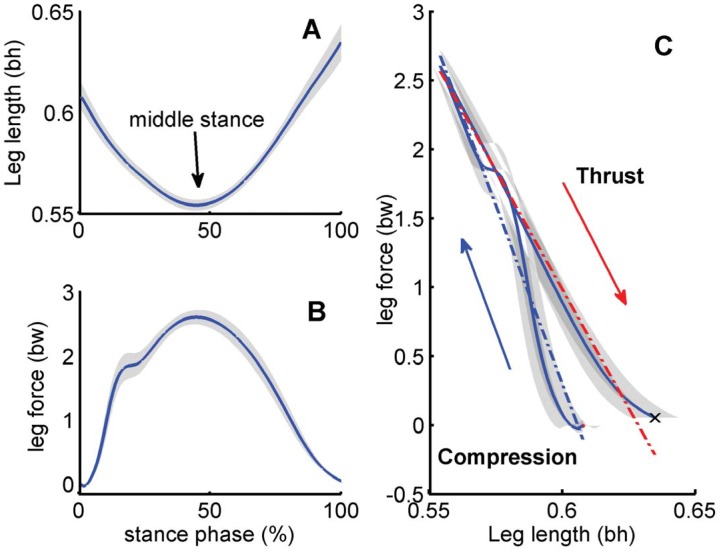
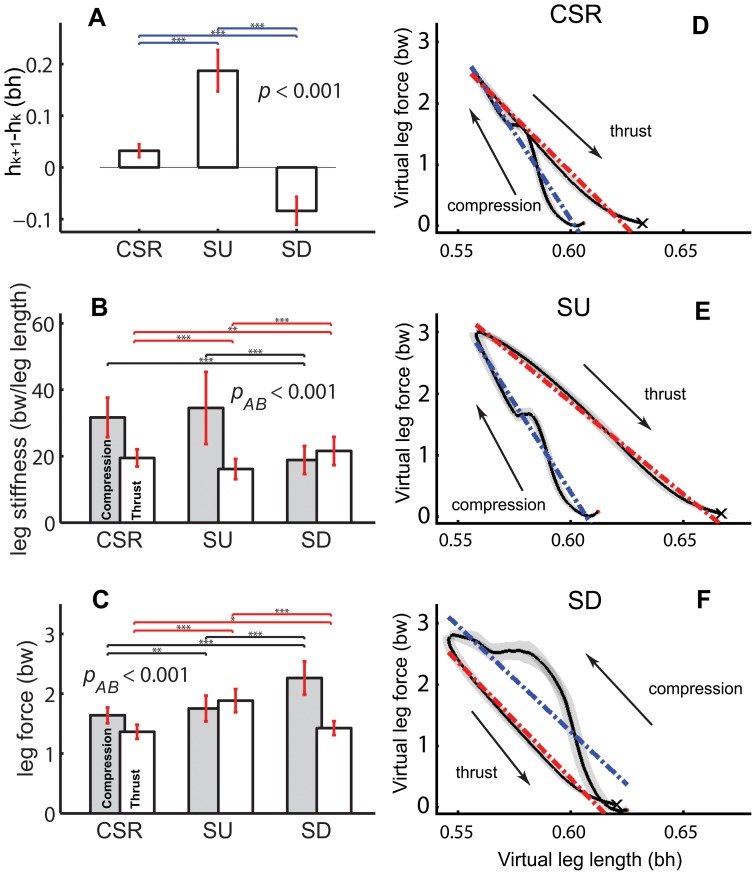
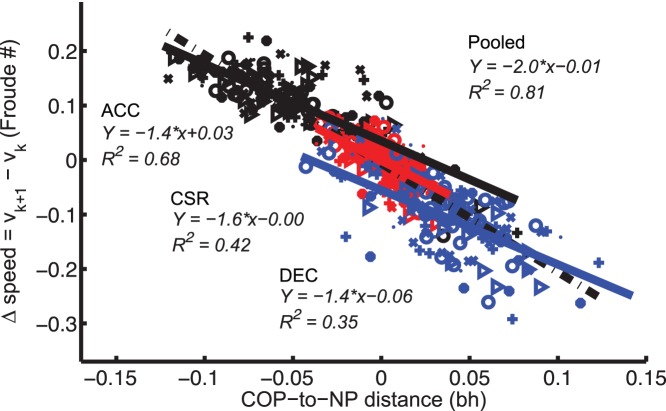
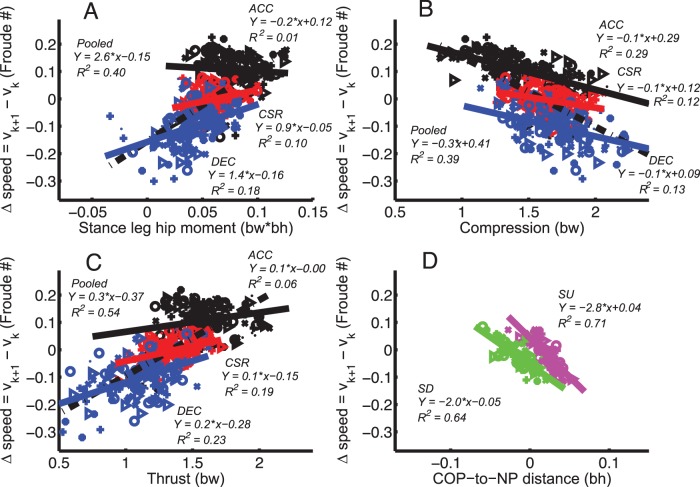
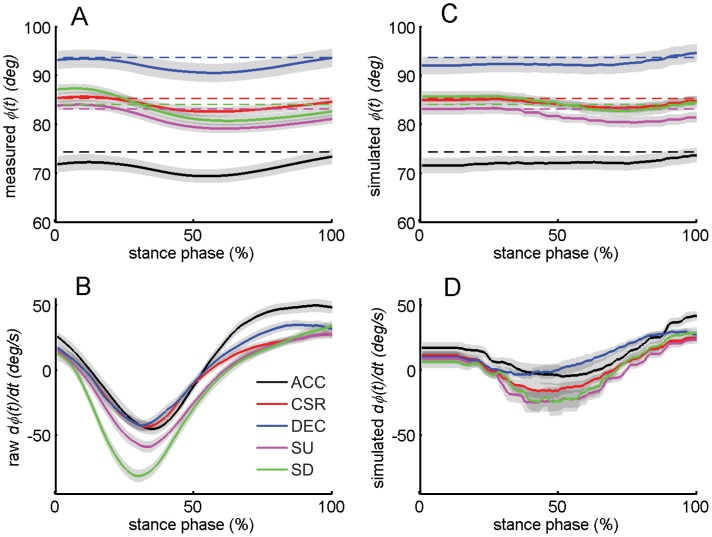
The strategies that humans use to control unsteady locomotion are not well understood. A "spring-mass" template comprised of a point mass bouncing on a sprung leg can approximate both center of mass movements and ground reaction forces during running in humans and other animals. Legged robots that operate as bouncing, "spring-mass" systems can maintain stable motion using relatively simple, distributed feedback rules. We tested whether the changes to sagittal-plane movements during five running tasks involving active changes to running height, speed, and orientation were consistent with the rules used by bouncing robots to maintain stability. Changes to running height were associated with changes to leg force but not stance duration. To change speed, humans primarily used a "pogo stick" strategy, where speed changes were associated with adjustments to fore-aft foot placement, and not a "unicycle" strategy involving systematic changes to stance leg hip moment. However, hip moments were related to changes to body orientation and angular speed. Hip moments could be described with first order proportional-derivative relationship to trunk pitch. Overall, the task-level strategies used for body control in humans were consistent with the strategies employed by bouncing robots. Identification of these behavioral strategies could lead to a better understanding of the sensorimotor mechanisms that allow for effective unsteady locomotion.
人类用来控制不稳定运动的策略还不是很清楚。一个由一个在弹簧腿上弹跳的质点组成的“弹簧质量”模板可以近似模拟人类和其他动物跑步时的质心运动和地面反作用力。作为弹跳“弹簧质量”系统运行的腿式机器人可以使用相对简单的分布式反馈规则来保持稳定的运动。我们测试了在涉及主动改变跑步高度、速度和方向的五个跑步任务中,矢状面运动的变化是否与弹跳机器人用来保持稳定性的规则一致。跑步高度的变化与腿部力量的变化有关,但与站立时间无关。为了改变速度,人类主要使用“弹簧单高跷”策略,其中速度的变化与前后脚的位置调整有关,而不是涉及到对支撑腿髋关节力矩的系统调整的“独轮车”策略。然而,髋关节力矩与身体方向和角速度的变化有关。髋关节力矩可以用与躯干俯仰的一阶比例-微分关系来描述。总的来说,人类在身体控制方面的任务级别策略与弹跳机器人所采用的策略一致。识别这些行为策略可以帮助我们更好地理解允许有效不稳定运动的感觉运动机制。