Dept. of Mechanical and Process Engineering, ETH, Zurich, Switzerland.
PLoS Comput Biol. 2014 Jul 24;10(7):e1003653. doi: 10.1371/journal.pcbi.1003653. eCollection 2014 Jul.
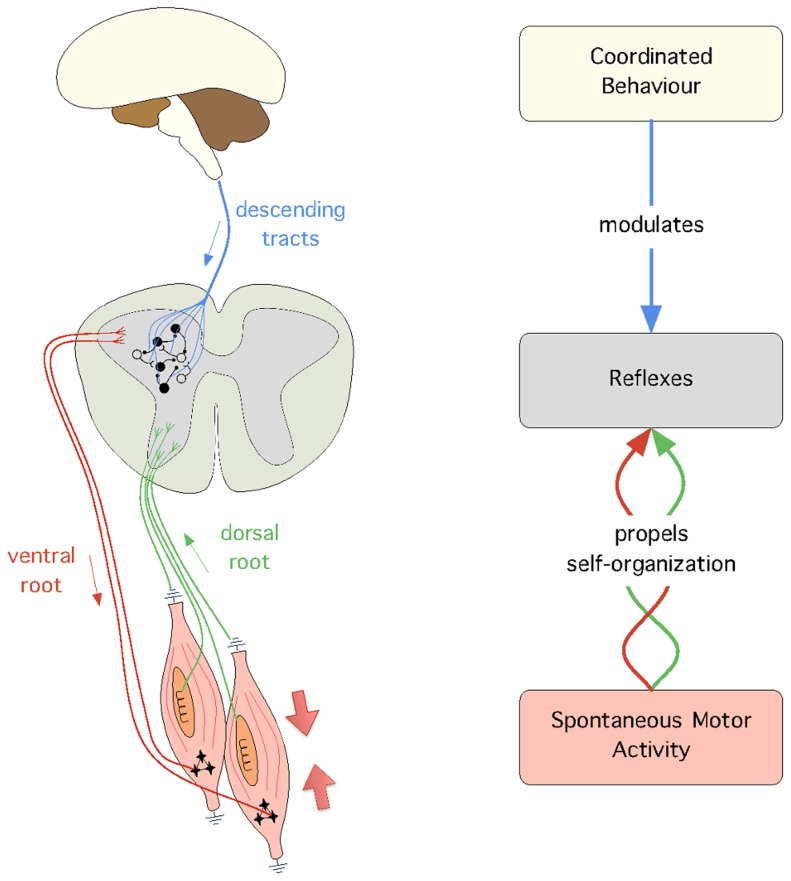
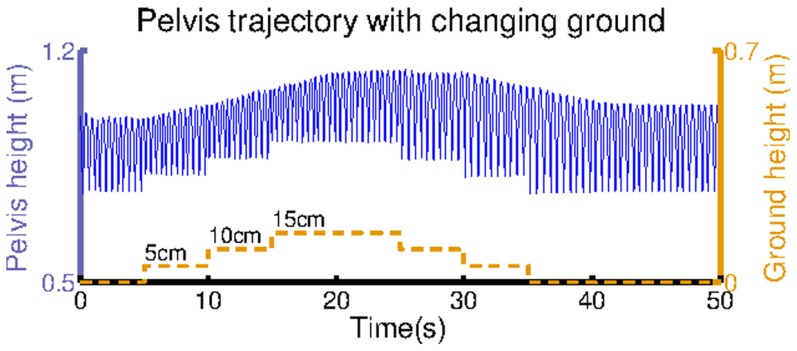
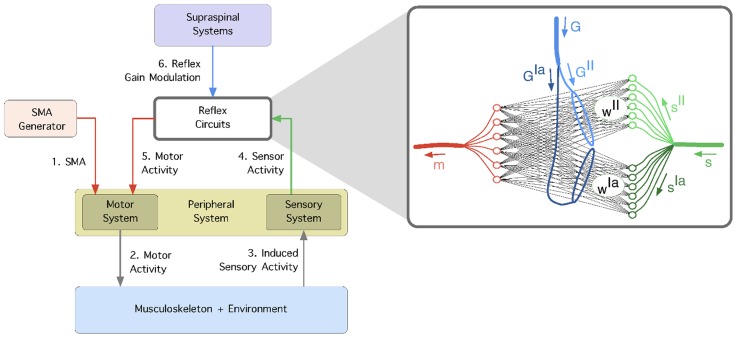
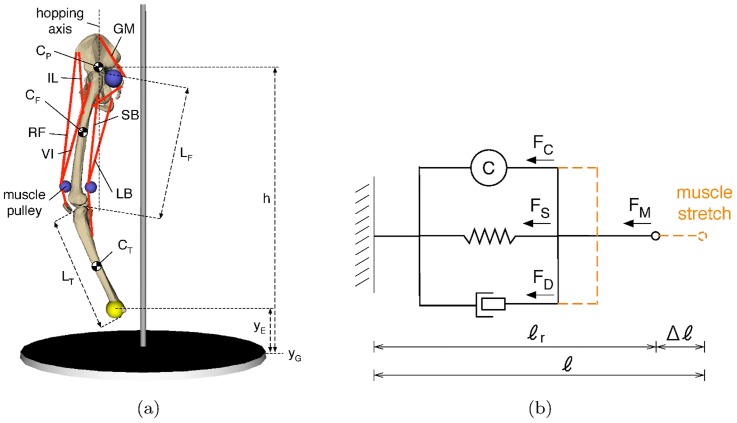
In mammals, the developmental path that links the primary behaviours observed during foetal stages to the full fledged behaviours observed in adults is still beyond our understanding. Often theories of motor control try to deal with the process of incremental learning in an abstract and modular way without establishing any correspondence with the mammalian developmental stages. In this paper, we propose a computational model that links three distinct behaviours which appear at three different stages of development. In order of appearance, these behaviours are: spontaneous motor activity (SMA), reflexes, and coordinated behaviours, such as locomotion. The goal of our model is to address in silico four hypotheses that are currently hard to verify in vivo: First, the hypothesis that spinal reflex circuits can be self-organized from the sensor and motor activity induced by SMA. Second, the hypothesis that supraspinal systems can modulate reflex circuits to achieve coordinated behaviour. Third, the hypothesis that, since SMA is observed in an organism throughout its entire lifetime, it provides a mechanism suitable to maintain the reflex circuits aligned with the musculoskeletal system, and thus adapt to changes in body morphology. And fourth, the hypothesis that by changing the modulation of the reflex circuits over time, one can switch between different coordinated behaviours. Our model is tested in a simulated musculoskeletal leg actuated by six muscles arranged in a number of different ways. Hopping is used as a case study of coordinated behaviour. Our results show that reflex circuits can be self-organized from SMA, and that, once these circuits are in place, they can be modulated to achieve coordinated behaviour. In addition, our results show that our model can naturally adapt to different morphological changes and perform behavioural transitions.
在哺乳动物中,将在胎儿阶段观察到的主要行为与在成年阶段观察到的成熟行为联系起来的发育途径仍然超出了我们的理解。通常,运动控制理论试图以抽象和模块化的方式处理增量学习过程,而不与哺乳动物的发育阶段建立任何对应关系。在本文中,我们提出了一个计算模型,该模型将在三个不同发育阶段出现的三种不同行为联系起来。这三种行为依次为:自发性运动活动(SMA)、反射和协调行为,如运动。我们模型的目标是在计算机上解决目前在体内难以验证的四个假设:首先,脊髓反射回路可以从 SMA 引起的传感器和运动活动中自我组织的假设。其次,假设上位系统可以调节反射回路以实现协调行为。第三,假设 SMA 在生物体的整个生命周期中都存在,它提供了一种合适的机制来保持反射回路与骨骼肌肉系统对齐,并因此适应身体形态的变化。第四,假设通过随时间改变反射回路的调制,可以在不同的协调行为之间进行切换。我们的模型在一个由六个肌肉驱动的模拟骨骼肌肉腿中进行了测试,这些肌肉以多种不同的方式排列。跳跃被用作协调行为的案例研究。我们的结果表明,反射回路可以从 SMA 中自我组织,并且一旦这些回路就位,它们就可以被调节以实现协调行为。此外,我们的结果表明,我们的模型可以自然地适应不同的形态变化并执行行为转换。