Dillon Neal P, Siebold Michael A, Mitchell Jason E, Blachon Gregoire S, Balachandran Ramya, Fitzpatrick J Michael, Webster Robert J
Vanderbilt University, Department of Mechanical Engineering, Nashville, Tennessee, USA.
Vanderbilt University, Department of Electrical Engineering and Computer Science, Nashville, Tennessee, USA.
Proc SPIE Int Soc Opt Eng. 2016;9786. doi: 10.1117/12.2214984. Epub 2016 Mar 18.
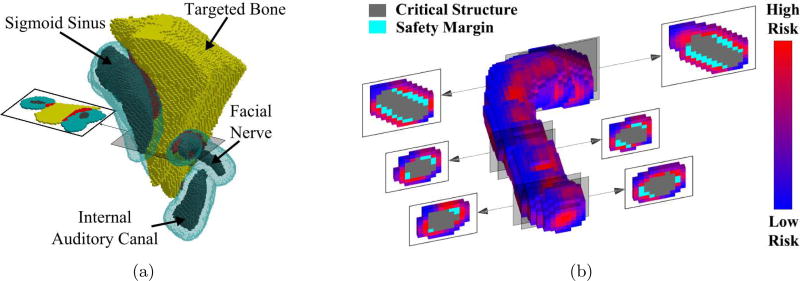
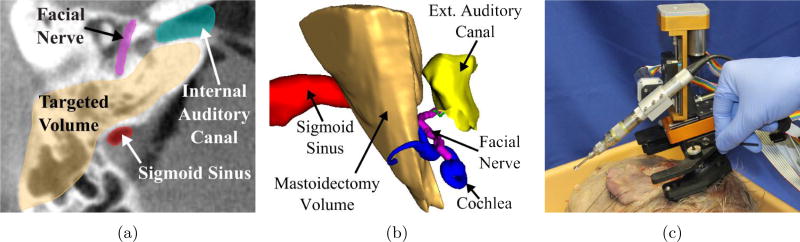
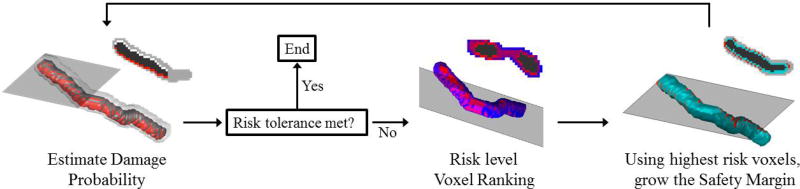
Safe and effective planning for robotic surgery that involves cutting or ablation of tissue must consider all potential sources of error when determining how close the tool may come to vital anatomy. A pre-operative plan that does not adequately consider potential deviations from ideal system behavior may lead to patient injury. Conversely, a plan that is overly conservative may result in ineffective or incomplete performance of the task. Thus, enforcing simple, uniform-thickness safety margins around vital anatomy is insufficient in the presence of spatially varying, anisotropic error. Prior work has used registration error to determine a variable-thickness safety margin around vital structures that must be approached during mastoidectomy but ultimately preserved. In this paper, these methods are extended to incorporate image distortion and physical robot errors, including kinematic errors and deflections of the robot. These additional sources of error are discussed and stochastic models for a bone-attached robot for otologic surgery are developed. An algorithm for generating appropriate safety margins based on a desired probability of preserving the underlying anatomical structure is presented. Simulations are performed on a CT scan of a cadaver head and safety margins are calculated around several critical structures for planning of a robotic mastoidectomy.
对于涉及组织切割或消融的机器人手术,进行安全有效的规划时,在确定手术工具与重要解剖结构的接近程度时,必须考虑所有潜在的误差来源。术前计划若未充分考虑与理想系统行为的潜在偏差,可能会导致患者受伤。相反,过于保守的计划可能会导致任务执行无效或不完整。因此,在存在空间变化的各向异性误差的情况下,仅在重要解剖结构周围设置简单、均匀厚度的安全 margins 是不够的。先前的工作利用配准误差来确定在乳突切除术中必须接近但最终要保留的重要结构周围的可变厚度安全 margins。在本文中,这些方法得到了扩展,以纳入图像失真和物理机器人误差,包括机器人的运动学误差和挠度。讨论了这些额外的误差来源,并开发了用于耳科手术的骨附着机器人的随机模型。提出了一种基于保留潜在解剖结构的期望概率生成适当安全 margins 的算法。在一具尸体头部的 CT 扫描上进行了模拟,并围绕几个关键结构计算了安全 margins,以用于机器人乳突切除术的规划。