Nycz Christopher J, Gondokaryono Radian, Carvalho Paulo, Patel Nirav, Wartenberg Marek, Pilitsis Julie G, Fischer Gregory S
Automation and Interventional Medicine (AIM) Lab, Worcester Polytechnic Institute, 100 Institute Rd, Worcester, MA, USA.
Department of Neurosurgery at Albany Medical Center, 43 New Scotland Avenue Albany, NY, USA.
Rep U S. 2017 Sep;2017:1677-1684. doi: 10.1109/IROS.2017.8205979. Epub 2017 Dec 14.
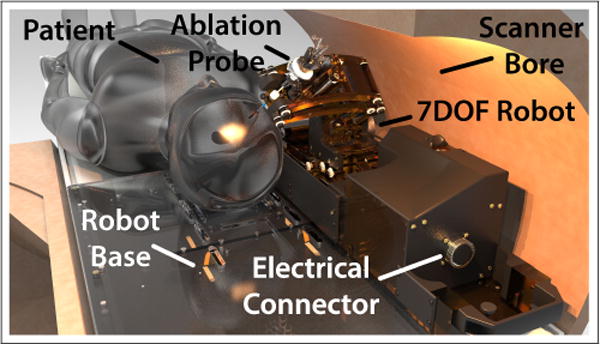
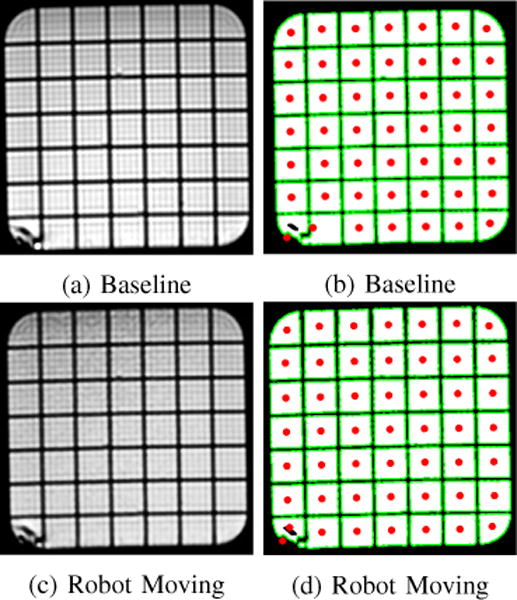
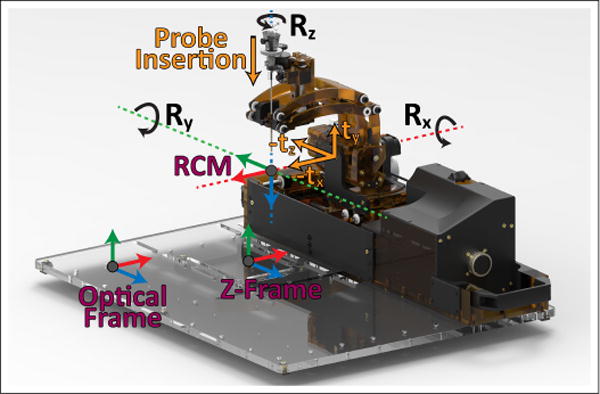
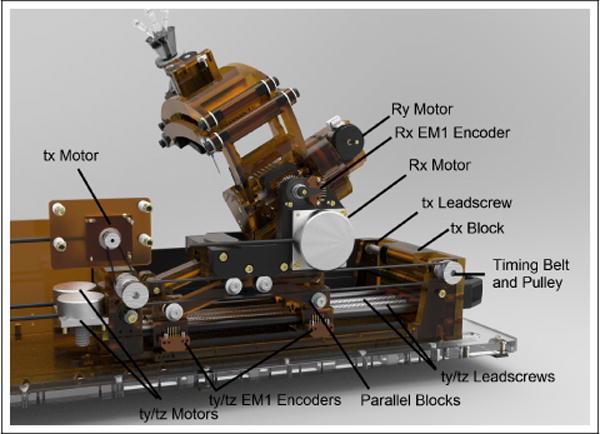
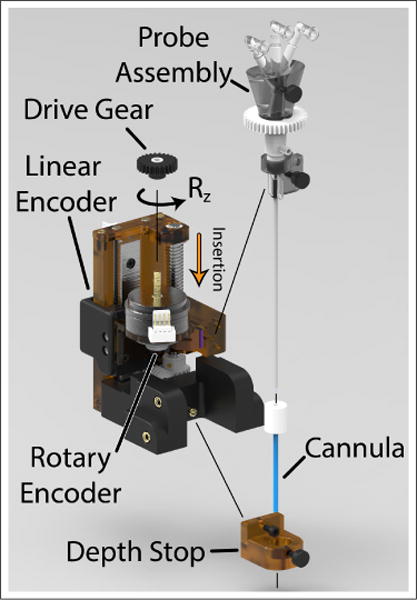
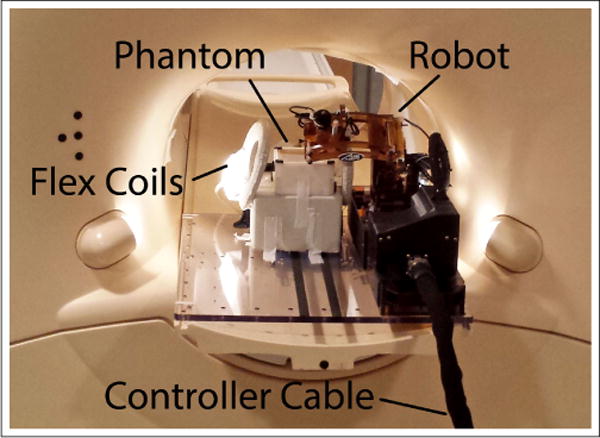
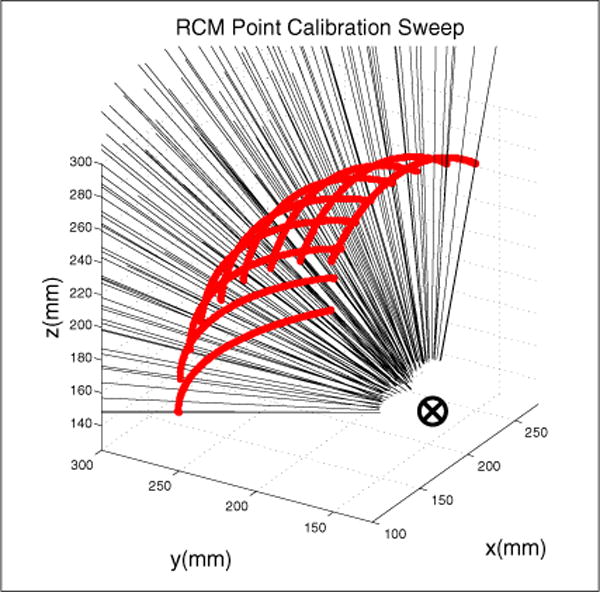
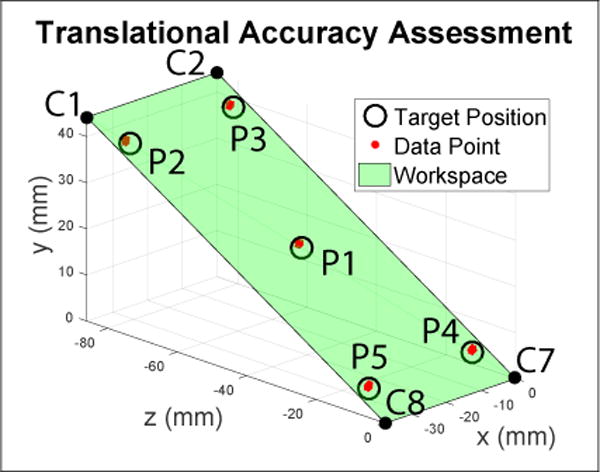
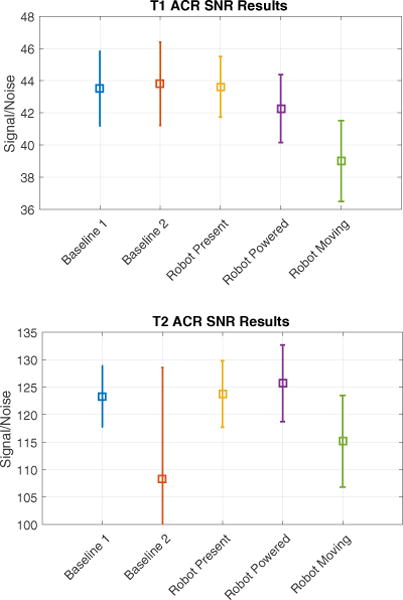
The use of magnetic resonance imaging (MRI) for guiding robotic surgical devices has shown great potential for performing precisely targeted and controlled interventions. To fully realize these benefits, devices must work safely within the tight confines of the MRI bore without negatively impacting image quality. Here we expand on previous work exploring MRI guided robots for neural interventions by presenting the mechanical design and assessment of a device for positioning, orienting, and inserting an interstitial ultrasound-based ablation probe. From our previous work we have added a 2 degree of freedom (DOF) needle driver for use with the aforementioned probe, revised the mechanical design to improve strength and function, and performed an evaluation of the mechanism's accuracy and effect on MR image quality. The result of this work is a 7-DOF MRI robot capable of positioning a needle tip and orienting it's axis with accuracy of 1.37 0.06 and 0.79° 0.41°, inserting it along it's axis with an accuracy of 0.06 0.07, and rotating it about it's axis to an accuracy of 0.77° 1.31°. This was accomplished with no significant reduction in SNR caused by the robot's presence in the MRI bore, ≤ 10.3% reduction in SNR from running the robot's motors during a scan, and no visible paramagnetic artifacts.
利用磁共振成像(MRI)引导机器人手术设备在进行精确靶向和可控干预方面显示出巨大潜力。为了充分实现这些益处,设备必须在MRI孔腔的狭窄空间内安全运行,且不会对图像质量产生负面影响。在此,我们通过展示一种用于定位、定向和插入基于间质超声的消融探针的设备的机械设计和评估,对之前探索用于神经干预的MRI引导机器人的工作进行了拓展。在我们之前的工作基础上,增加了一个用于上述探针的两自由度(DOF)针驱动器,修订了机械设计以提高强度和功能,并对该机构的精度及其对MR图像质量的影响进行了评估。这项工作的成果是一个七自由度MRI机器人,它能够将针尖定位并将其轴线定向,精度分别为1.37°±0.06°和0.79°±0.41°,沿其轴线插入时精度为0.06±0.07,绕其轴线旋转时精度为0.77°±1.31°。在MRI孔腔内,机器人的存在不会导致信噪比显著降低,扫描期间运行机器人电机时信噪比降低≤10.3%,且没有可见的顺磁性伪影。