Physical Intelligence Department, Max Planck Institute for Intelligent Systems, 70569, Stuttgart, Germany.
Nat Commun. 2019 Jul 18;10(1):3188. doi: 10.1038/s41467-019-11141-9.
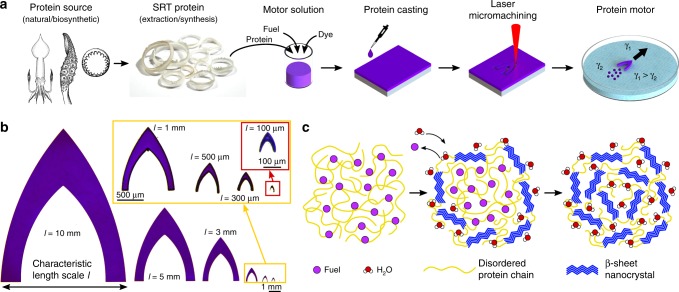
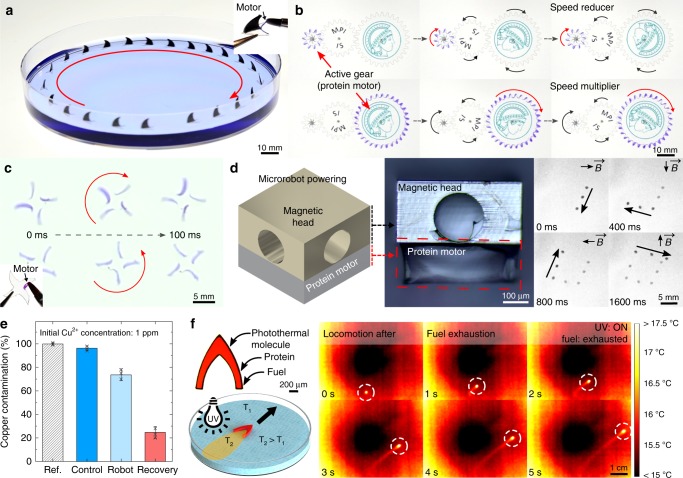
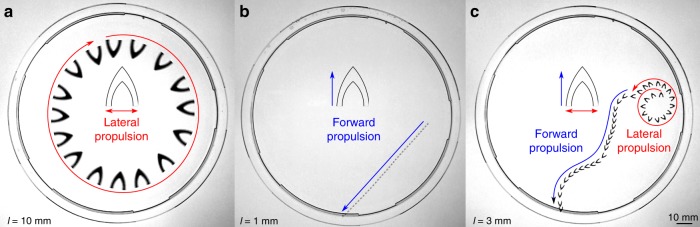
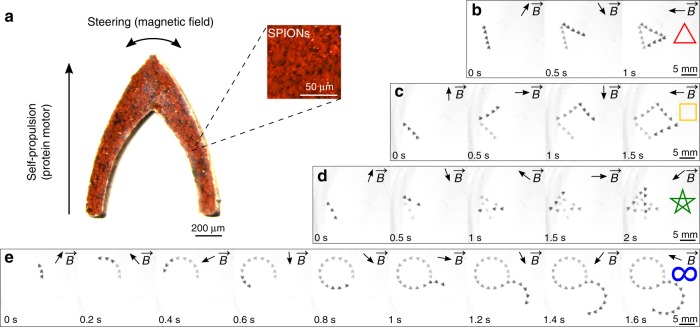
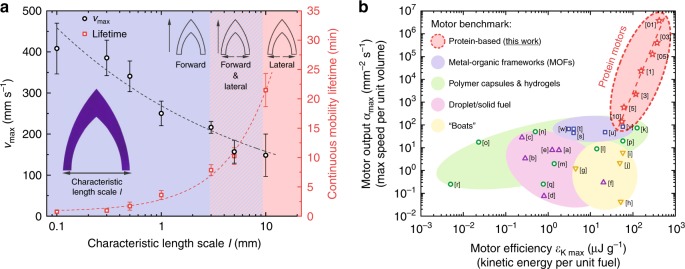
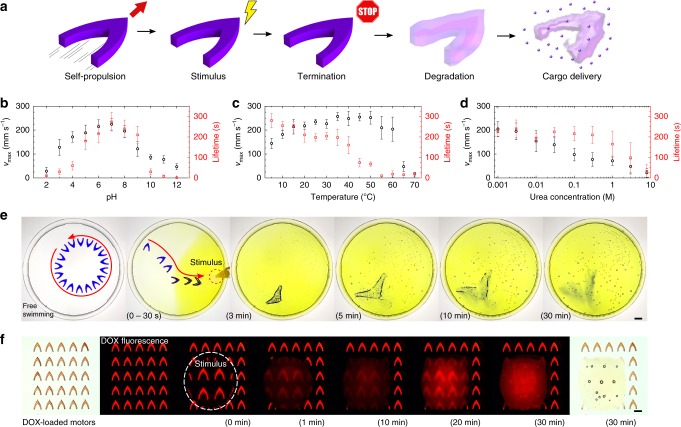
A diversity of self-propelled chemical motors, based on Marangoni propulsive forces, has been developed in recent years. However, most motors are non-functional due to poor performance, a lack of control, and the use of toxic materials. To overcome these limitations, we have developed multifunctional and biodegradable self-propelled motors from squid-derived proteins and an anesthetic metabolite. The protein motors surpass previous reports in performance output and efficiency by several orders of magnitude, and they offer control of their propulsion modes, speed, mobility lifetime, and directionality by regulating the protein nanostructure via local and external stimuli, resulting in programmable and complex locomotion. We demonstrate diverse functionalities of these motors in environmental remediation, microrobot powering, and cargo delivery applications. These versatile and degradable protein motors enable design, control, and actuation strategies in microrobotics as modular propulsion sources for autonomous minimally invasive medical operations in biological environments with air-liquid interfaces.
近年来,已经开发出了多种基于 Marangoni 推进力的自主化学马达。然而,由于性能不佳、缺乏控制以及使用有毒材料,大多数马达都无法正常工作。为了克服这些限制,我们使用鱿鱼衍生蛋白和一种麻醉代谢物开发出了多功能和可生物降解的自主推进马达。与之前的报告相比,这些蛋白马达在性能输出和效率方面提高了几个数量级,并且通过局部和外部刺激调节蛋白纳米结构,可以控制其推进模式、速度、迁移寿命和方向,从而实现可编程和复杂的运动。我们展示了这些马达在环境修复、微型机器人动力和货物输送等应用中的多种功能。这些多功能且可降解的蛋白马达可作为模块化推进源,用于在具有气-液界面的生物环境中进行自主微创医疗操作,为空气-液体界面环境下的自主微创医疗操作提供设计、控制和驱动策略。