Biological Cybernetics, Faculty of Biology, Bielefeld University, Bielefeld, Germany.
Cognitive Interaction Technology-Center of Excellence (CITEC), Bielefeld University, Bielefeld, Germany.
PLoS Comput Biol. 2019 Oct 14;15(10):e1007437. doi: 10.1371/journal.pcbi.1007437. eCollection 2019 Oct.
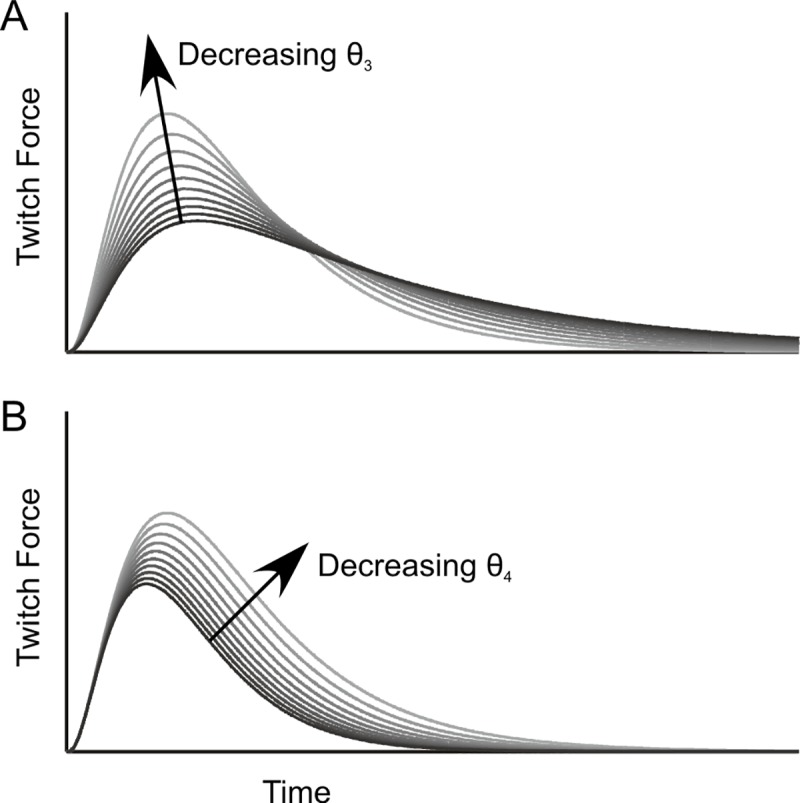
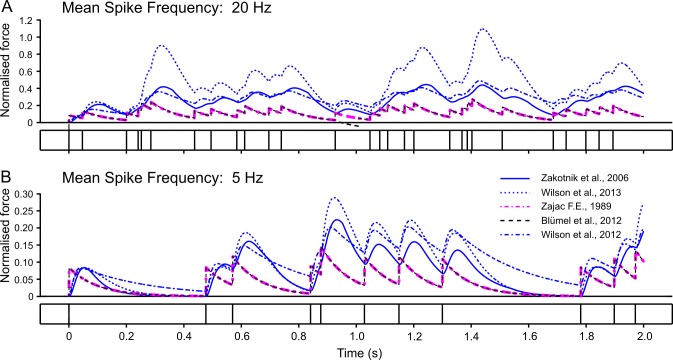
In computational modelling of sensory-motor control, the dynamics of muscle contraction is an important determinant of movement timing and joint stiffness. This is particularly so in animals with many slow muscles, as is the case in insects-many of which are important models for sensory-motor control. A muscle model is generally used to transform motoneuronal input into muscle force. Although standard models exist for vertebrate muscle innervated by many motoneurons, there is no agreement on a parametric model for single motoneuron stimulation of invertebrate muscle. Although several different models have been proposed, they have never been evaluated using a common experimental data set. We evaluate five models for isometric force production of a well-studied model system: the locust hind leg tibial extensor muscle. The response of this muscle to motoneuron spikes is best modelled as a non-linear low-pass system. Linear first-order models can approximate isometric force time courses well at high spike rates, but they cannot account for appropriate force time courses at low spike rates. A linear third-order model performs better, but only non-linear models can account for frequency-dependent change of decay time and force potentiation at intermediate stimulus frequencies. Some of the differences among published models are due to differences among experimental data sets. We developed a comprehensive toolbox for modelling muscle activation dynamics, and optimised model parameters using one data set. The "Hatze-Zakotnik model" that emphasizes an accurate single-twitch time course and uses frequency-dependent modulation of the twitch for force potentiation performs best for the slow motoneuron. Frequency-dependent modulation of a single twitch works less well for the fast motoneuron. The non-linear "Wilson" model that optimises parameters to all data set parts simultaneously performs better here. Our open-access toolbox provides powerful tools for researchers to fit appropriate models to a range of insect muscles.
在感觉运动控制的计算建模中,肌肉收缩的动力学是运动定时和关节刚度的重要决定因素。在具有许多慢肌的动物中尤其如此,而昆虫就是感觉运动控制的重要模型之一。肌肉模型通常用于将运动神经元输入转换为肌肉力。虽然存在用于许多运动神经元支配的脊椎动物肌肉的标准模型,但对于单个运动神经元刺激的昆虫肌肉,没有关于参数模型的共识。虽然已经提出了几种不同的模型,但它们从未使用共同的实验数据集进行评估。我们评估了用于研究得很好的模型系统:蝗虫后腿胫骨伸肌的等长力产生的五个模型。该肌肉对运动神经元尖峰的反应最好被建模为非线性低通系统。线性一阶模型可以很好地近似等长力时间过程在高尖峰率下,但它们不能解释低尖峰率下适当的力时间过程。线性三阶模型表现更好,但只有非线性模型才能解释中间刺激频率下的衰减时间和力增强的频率依赖性变化。发表模型之间的一些差异是由于实验数据集之间的差异。我们开发了一个用于肌肉激活动力学建模的综合工具箱,并使用一个数据集优化了模型参数。“Hatze-Zakotnik 模型”强调准确的单次抽搐时间过程,并使用对抽搐的频率相关调制进行力增强,对慢运动神经元表现最佳。对单个抽搐的频率相关调制对快运动神经元的作用较小。同时优化所有数据集部分参数的非线性“Wilson”模型在此处表现更好。我们的开放访问工具箱为研究人员提供了强大的工具,可将合适的模型拟合到一系列昆虫肌肉中。