College of Physics and Information Engineering, Fuzhou University, Fuzhou City 350116, Fujian Province, China.
Department of Mathematics and Physics, Fujian University of Technology, Fuzhou City 350118, Fujian Province, China.
Sensors (Basel). 2020 Feb 21;20(4):1185. doi: 10.3390/s20041185.
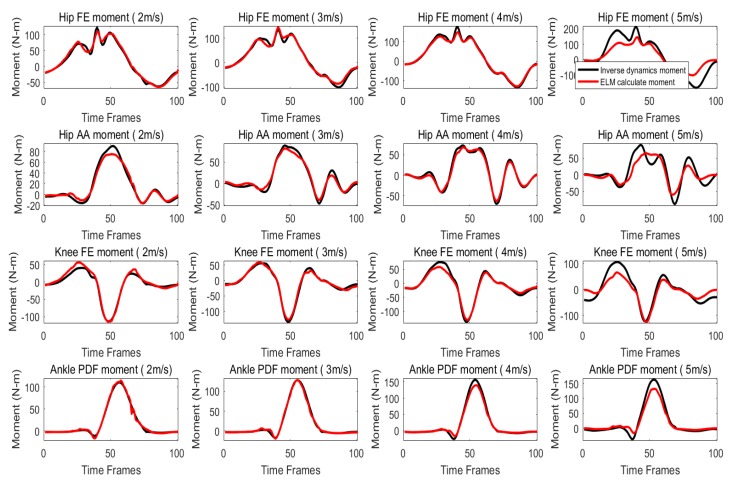
: Human joint moment is a critical parameter to rehabilitation assessment and human-robot interaction, which can be predicted using an artificial neural network (ANN) model. However, challenge remains as lack of an effective approach to determining the input variables for the ANN model in joint moment prediction, which determines the number of input sensors and the complexity of prediction. : To address this research gap, this study develops a mathematical model based on the Hill muscle model to determining the online input variables of the ANN for the prediction of joint moments. In this method, the muscle activation, muscle-tendon moment velocity and length in the Hill muscle model and muscle-tendon moment arm are translated to the online measurable variables, i.e. muscle electromyography (EMG), joint angles and angular velocities of the muscle span. To test the predictive ability of these input variables, an ANN model is designed and trained to predict joint moments. The ANN model with the online measurable input variables is tested on the experimental data collected from ten healthy subjects running with the speeds of 2, 3, 4 and 5 m/s on a treadmill. The variance accounted for (VAF) between the predicted and inverse dynamics moment is used to evaluate the prediction accuracy. : The results suggested that the method can predict joint moments with a higher accuracy (mean VAF = 89.67±5.56 %) than those obtained by using other joint angles and angular velocities as inputs (mean VAF = 86.27±6.6%) evaluated by jack-knife cross-validation. : The proposed method provides us with a powerful tool to predict joint moment based on online measurable variables, which establishes the theoretical basis for optimizing the input sensors and detection complexity of the prediction system. It may facilitate the research on exoskeleton robot control and real-time gait analysis in motor rehabilitation.
人体关节力矩是康复评估和人机交互的关键参数,可以使用人工神经网络 (ANN) 模型进行预测。然而,在关节力矩预测中,确定 ANN 模型的输入变量仍然存在挑战,因为这决定了输入传感器的数量和预测的复杂性。为了解决这个研究差距,本研究开发了一种基于 Hill 肌肉模型的数学模型,用于确定 ANN 用于预测关节力矩的在线输入变量。在这种方法中,Hill 肌肉模型中的肌肉激活、肌肉肌腱力矩速度和长度以及肌肉肌腱力臂被转换为在线可测量变量,即肌肉肌电图 (EMG)、关节角度和肌肉跨度的角速度。为了测试这些输入变量的预测能力,设计并训练了一个 ANN 模型来预测关节力矩。在跑步机上以 2、3、4 和 5 m/s 的速度跑步的 10 名健康受试者的实验数据上测试了带有在线可测量输入变量的 ANN 模型。预测和逆动力学力矩之间的方差解释 (VAF) 用于评估预测精度。结果表明,该方法可以比使用其他关节角度和角速度作为输入(平均 VAF=86.27±6.6%)获得更高的预测精度(平均 VAF=89.67±5.56%),通过 Jackknife 交叉验证评估。该方法为基于在线可测量变量预测关节力矩提供了有力工具,为优化预测系统的输入传感器和检测复杂性奠定了理论基础。它可能有助于外骨骼机器人控制和运动康复中的实时步态分析研究。