Li An, Li Huizeng, Li Zheng, Zhao Zhipeng, Li Kaixuan, Li Mingzhu, Song Yanlin
Key Laboratory of Green Printing, CAS Research/Education Center for Excellence in Molecular Sciences, Institute of Chemistry, Chinese Academy of Sciences, Beijing 100190, P. R. China.
University of Chinese Academy of Sciences, Beijing 100049, P. R. China.
Sci Adv. 2020 Feb 14;6(7):eaay5808. doi: 10.1126/sciadv.aay5808. eCollection 2020 Feb.
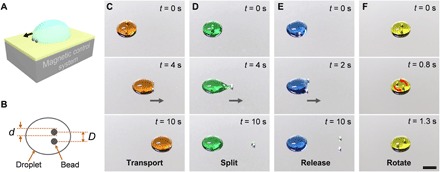
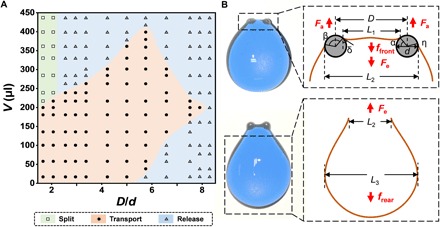
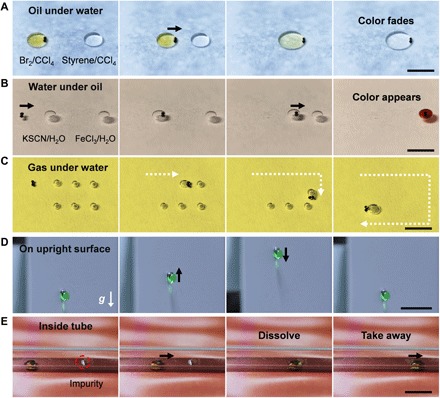
Droplet manipulations are fundamental to numerous applications, such as water collection, medical diagnostics, and drug delivery. Structure-based liquid operations have been widely used both in nature and in artificial materials. However, current strategies depend mainly on fixed structures to realize unidirectional water movement, while multiple manipulation of droplets is still challenging. Here, we propose a magnetic-actuated robot with adjustable structures to achieve programmable multiple manipulations of droplets. The adjustable structure redistributes the resisting forces from the front and rear ends of the droplets, which determine the droplet behaviors. We can transport, split, release, and rotate the droplets using the robot. This robot is universally applicable for manipulation of various fluids in rough environments. These findings offer an efficient strategy for automated manipulation of droplets.
液滴操控对于众多应用至关重要,比如集水、医学诊断和药物输送。基于结构的液体操作在自然界和人造材料中都已得到广泛应用。然而,当前策略主要依赖固定结构来实现单向水流动,而对液滴进行多种操控仍然具有挑战性。在此,我们提出一种具有可调节结构的磁驱动机器人,以实现对液滴的可编程多种操控。可调节结构重新分配来自液滴前端和后端的阻力,这些阻力决定了液滴的行为。我们能够使用该机器人对液滴进行运输、分裂、释放和旋转。这种机器人普遍适用于在恶劣环境中对各种流体进行操控。这些发现为液滴的自动化操控提供了一种有效策略。