Physical Intelligence Department, Max Planck Institute for Intelligent Systems, Stuttgart 70569, Germany.
State Key Laboratory of Robotics and Systems, Harbin Institute of Technology, Harbin 150080, China.
Proc Natl Acad Sci U S A. 2020 Nov 10;117(45):27916-27926. doi: 10.1073/pnas.2016388117. Epub 2020 Oct 26.
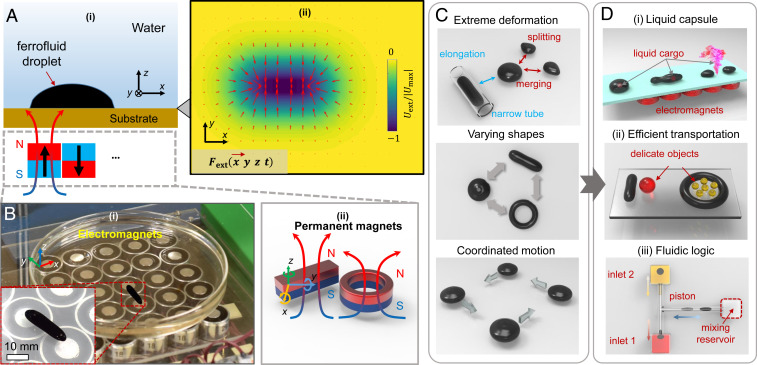
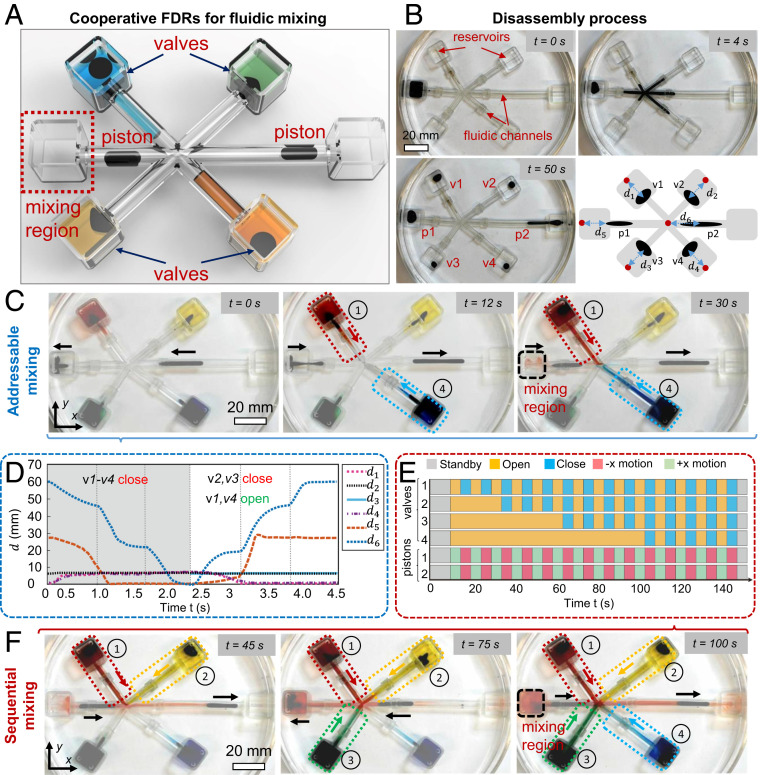
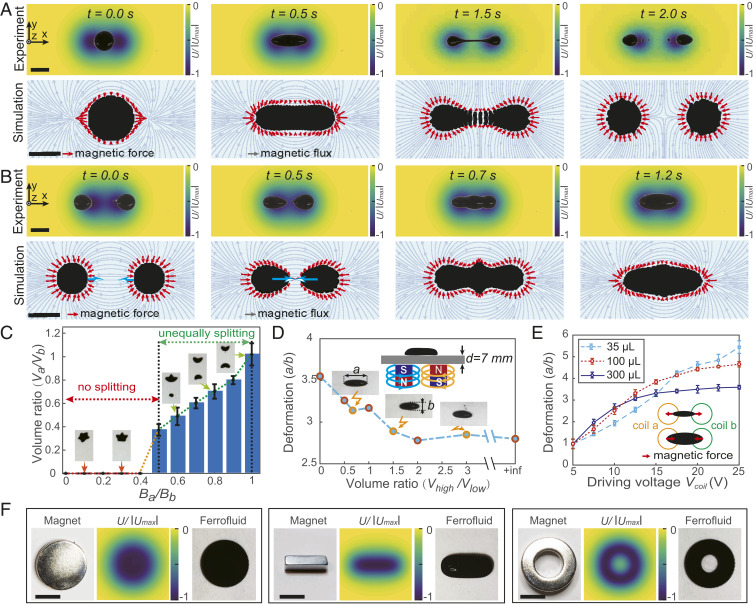
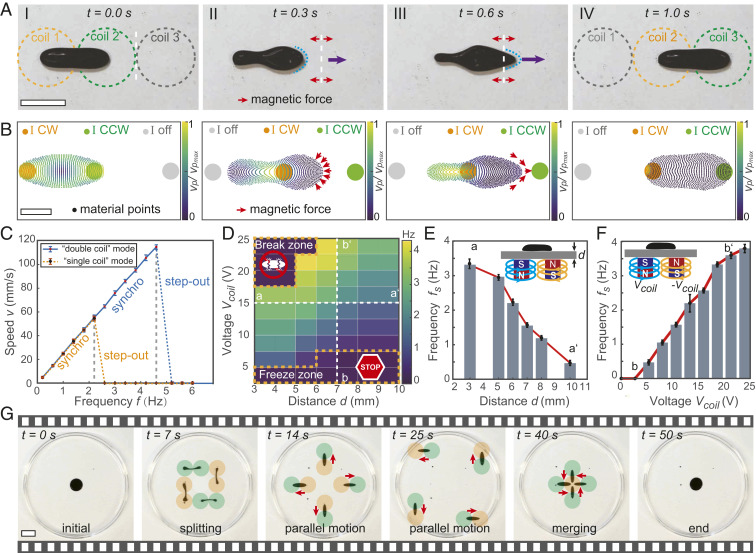
Magnetically actuated miniature soft robots are capable of programmable deformations for multimodal locomotion and manipulation functions, potentially enabling direct access to currently unreachable or difficult-to-access regions inside the human body for minimally invasive medical operations. However, magnetic miniature soft robots are so far mostly based on elastomers, where their limited deformability prevents them from navigating inside clustered and very constrained environments, such as squeezing through narrow crevices much smaller than the robot size. Moreover, their functionalities are currently restricted by their predesigned shapes, which is challenging to be reconfigured in situ in enclosed spaces. Here, we report a method to actuate and control ferrofluid droplets as shape-programmable magnetic miniature soft robots, which can navigate in two dimensions through narrow channels much smaller than their sizes thanks to their liquid properties. By controlling the external magnetic fields spatiotemporally, these droplet robots can also be reconfigured to exhibit multiple functionalities, including on-demand splitting and merging for delivering liquid cargos and morphing into different shapes for efficient and versatile manipulation of delicate objects. In addition, a single-droplet robot can be controlled to split into multiple subdroplets and complete cooperative tasks, such as working as a programmable fluidic-mixing device for addressable and sequential mixing of different liquids. Due to their extreme deformability, in situ reconfigurability and cooperative behavior, the proposed ferrofluid droplet robots could open up a wide range of unprecedented functionalities for lab/organ-on-a-chip, fluidics, bioengineering, and medical device applications.
磁性驱动的微型软机器人能够进行可编程变形,实现多模态运动和操作功能,有可能为微创医疗手术提供直接进入人体目前无法到达或难以到达区域的途径。然而,到目前为止,磁性微型软机器人主要基于弹性体,其有限的可变形性限制了它们在密集和非常受限的环境中的导航能力,例如无法通过比机器人尺寸小得多的狭窄缝隙。此外,它们的功能目前受到其预设形状的限制,这在封闭空间中难以现场重新配置。在这里,我们报告了一种方法,可以激活和控制作为形状可编程磁性微型软机器人的铁磁流体液滴,由于其液体性质,这些液滴机器人可以在二维空间中通过比它们的尺寸小得多的狭窄通道进行导航。通过时空控制外部磁场,这些液滴机器人还可以重新配置以展示多种功能,包括按需分裂和合并以输送液体货物,并变形为不同形状以高效、多功能地操作精细物体。此外,单个液滴机器人可以被控制分裂成多个亚液滴,并完成协作任务,例如作为可编程的流体混合装置,用于不同液体的可寻址和顺序混合。由于其极端的可变形性、现场可重构性和协作行为,所提出的铁磁流体液滴机器人可以为实验室/芯片上器官、流体学、生物工程和医疗器械应用带来广泛的前所未有的功能。