Dingler Carsten, Müller Henry, Wieland Matthias, Fauser Dominik, Steeb Holger, Ludwigs Sabine
IPOC-Functional Polymers, Institute of Polymer Chemistry, University of Stuttgart, Pfaffenwaldring 55, 70569, Stuttgart, Germany.
Institute of Applied Mechanics (Civil Engineering) & SC SimTech, University of Stuttgart, Pfaffenwaldring 7, 70569, Stuttgart, Germany.
Adv Mater. 2021 Mar;33(9):e2007982. doi: 10.1002/adma.202007982. Epub 2021 Jan 20.
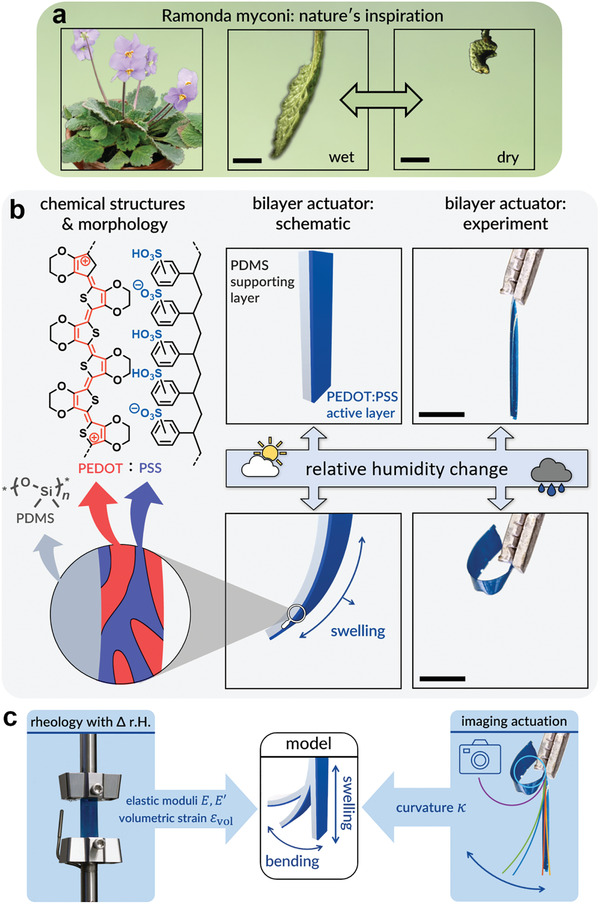
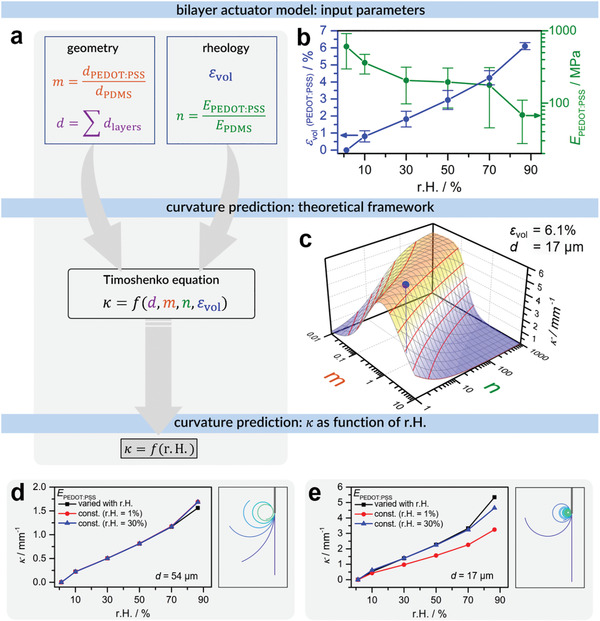
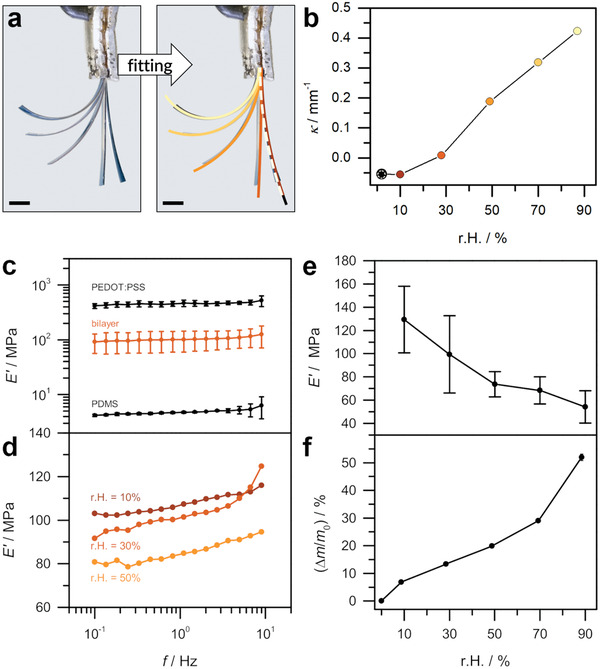
Nature will always be an endless source of bioinspiration for man-made smart materials and multifunctional devices. Impressively, even cutoff leaves from resurrection plants can autonomously and reproducibly change their shape upon humidity changes, which goes along with total recovery of their mechanical properties after being completely dried. In this work, simple bilayers are presented as autonomously moving, humidity-triggered bending actuators. The bilayers-showing reproducible bending behavior with reversible kinematics and multiway behavior-are studied in terms of their mechanical behavior upon humidity changes. The active layer consists of a highly conducting polymer film based on poly(3,4-ethylenedioxythiophene):poly(styrene sulfonate) (PEDOT:PSS) with poly(dimethylsiloxane) (PDMS) as passive layer. The response to humidity is explored with dynamic mechanical thermal analysis and quartz crystal microbalance measurements. Introduction of a composite beam model allows to predict the curvature of the actuators with input from the rheological measurements. It is clearly demonstrated that volumetric strain and Young's modulus, both heavily influenced by the water uptake, dominate the bending behavior and therefore the curvature of the actuators. This loop of rheological characterization coupled with an analytical model allows to predict curvatures of in principle any complex geometry and material combination for moving parts in soft robotics.
自然界将永远是人造智能材料和多功能设备的无尽生物灵感来源。令人印象深刻的是,即使是复苏植物的干枯叶子也能在湿度变化时自主且可重复地改变其形状,并且在完全干燥后其机械性能能完全恢复。在这项工作中,简单的双层结构被展示为自主移动、湿度触发的弯曲致动器。对这种具有可逆运动学和多向行为的可重复弯曲行为的双层结构,研究了其在湿度变化时的力学行为。活性层由基于聚(3,4 - 乙撑二氧噻吩):聚(苯乙烯磺酸盐)(PEDOT:PSS)的高导电聚合物薄膜组成,以聚二甲基硅氧烷(PDMS)作为被动层。通过动态机械热分析和石英晶体微天平测量来探索对湿度的响应。引入复合梁模型使得能够根据流变学测量的输入来预测致动器的曲率。清楚地表明,体积应变和杨氏模量都受到吸水的严重影响,它们主导了弯曲行为,进而主导了致动器的曲率。这种流变学表征与分析模型的循环使得能够预测原则上任何复杂几何形状和材料组合的软机器人运动部件的曲率。