Poliero Tommaso, Lazzaroni Maria, Toxiri Stefano, Di Natali Christian, Caldwell Darwin G, Ortiz Jesús
Department of Advanced Robotics, Istituto Italiano di Tecnologia, Genoa, Italy.
Department of Informatics Bioengineering Robotics and Systems Engineering, University of Genoa, Genoa, Italy.
Front Robot AI. 2020 Dec 9;7:579963. doi: 10.3389/frobt.2020.579963. eCollection 2020.
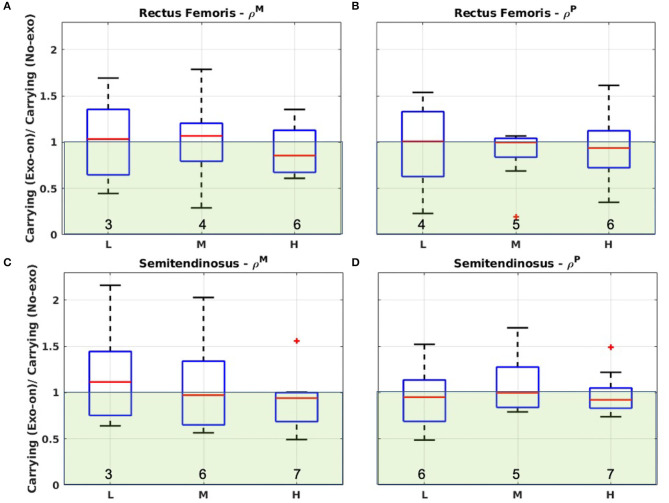
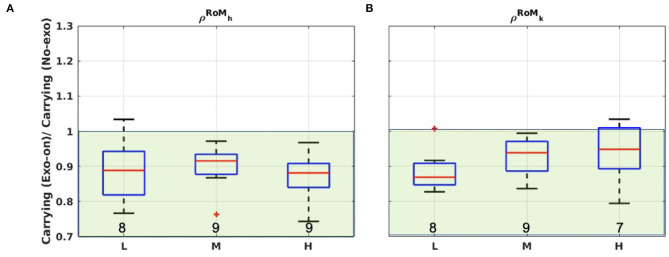
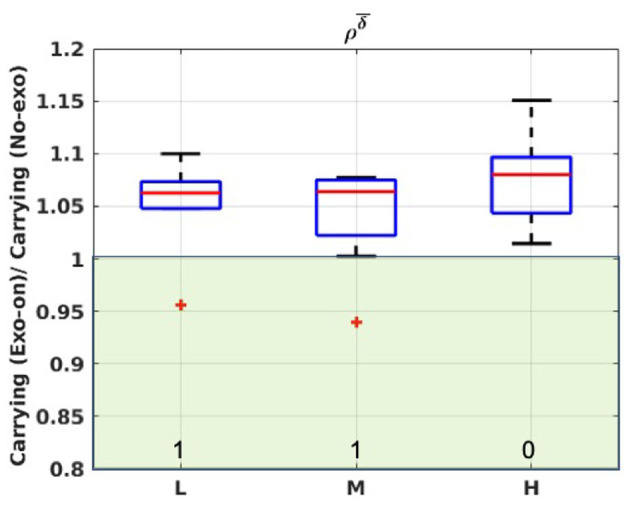
Occupational back-support exoskeletons are becoming a more and more common solution to mitigate work-related lower-back pain associated with lifting activities. In addition to lifting, there are many other tasks performed by workers, such as carrying, pushing, and pulling, that might benefit from the use of an exoskeleton. In this work, the impact that carrying has on lower-back loading compared to lifting and the need to select different assistive strategies based on the performed task are presented. This latter need is studied by using a control strategy that commands for constant torques. The results of the experimental campaign conducted on 9 subjects suggest that such a control strategy is beneficial for the back muscles (up to 12% reduction in overall lumbar activity), but constrains the legs (around 10% reduction in hip and knee ranges of motion). Task recognition and the design of specific controllers can be exploited by active and, partially, passive exoskeletons to enhance their versatility, i.e., the ability to adapt to different requirements.
职业背部支撑外骨骼正成为一种越来越常见的解决方案,以减轻与举重活动相关的工作性下背痛。除了举重,工人还会执行许多其他任务,如搬运、推和拉,使用外骨骼可能会从中受益。在这项工作中,展示了与举重相比,搬运对下背部负荷的影响,以及根据执行的任务选择不同辅助策略的必要性。通过使用一种命令恒定扭矩的控制策略来研究后一种需求。对9名受试者进行的实验活动结果表明,这种控制策略对背部肌肉有益(总体腰椎活动减少多达12%),但会限制腿部(髋部和膝盖活动范围减少约10%)。主动和部分被动外骨骼可以利用任务识别和特定控制器的设计来提高其通用性,即适应不同要求的能力。