Kirkwood Gavin Lawrence, Otmar Christopher D, Hansia Mohemmad
Department of Communication, University of California, Santa Barbara, Santa Barbara, CA, United States.
Front Psychol. 2021 Feb 17;12:624108. doi: 10.3389/fpsyg.2021.624108. eCollection 2021.
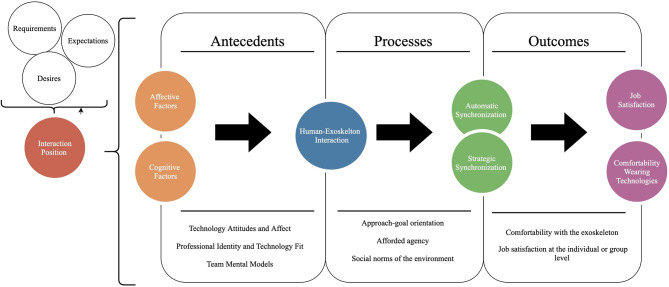
Wearable robots are an emerging form of technology that allow organizations to combine the strength, precision, and performance of machines with the flexibility, intelligence, and problem-solving abilities of human wearers. Active exoskeletons are a type of wearable robot that gives wearers the ability to effortlessly lift up to 200 lbs., as well as perform other types of physically demanding tasks that would be too strenuous for most humans. Synchronization between exoskeleton suits and wearers is one of the most challenging requirements to operate these technologies effectively. In this conceptual paper, we extend interpersonal adaption theory (IAT) to the exoskeleton context and explicate (a) the antecedents that are most likely to shape synchrony in human-exoskeleton interactions, (b) automatic and strategic synchrony as adaptive behaviors in human-exoskeleton interactions, and (c) outcome variables that are especially important in these processes. Lastly, we offer a discussion of key methodological challenges for measuring synchrony in human-exoskeleton interactions and offer a future research agenda for this important area.
可穿戴机器人是一种新兴的技术形式,它使机构能够将机器的力量、精度和性能与人类穿戴者的灵活性、智能和解决问题的能力结合起来。主动式外骨骼是可穿戴机器人的一种类型,它能让穿戴者毫不费力地举起高达200磅的重物,还能执行其他对大多数人来说过于费力的体力要求高的任务。外骨骼套装与穿戴者之间的同步是有效操作这些技术最具挑战性的要求之一。在这篇概念性论文中,我们将人际适应理论(IAT)扩展到外骨骼情境中,并阐述(a)在人机外骨骼交互中最有可能塑造同步性的前因,(b)作为人机外骨骼交互中适应性行为的自动同步和策略同步,以及(c)在这些过程中特别重要的结果变量。最后,我们讨论了测量人机外骨骼交互中同步性的关键方法挑战,并为这一重要领域提供了未来的研究议程。