Awad Louis N, Kudzia Pawel, Revi Dheepak Arumukhom, Ellis Terry D, Walsh Conor J
College of Health and Rehabilitation Sciences: Sargent College, Boston University, Boston, MA.
Harvard John A. Paulson School of Engineering and Applied Sciences, Harvard University, Cambridge, MA.
IEEE Open J Eng Med Biol. 2020;1:108-115. doi: 10.1109/ojemb.2020.2984429. Epub 2020 Apr 2.
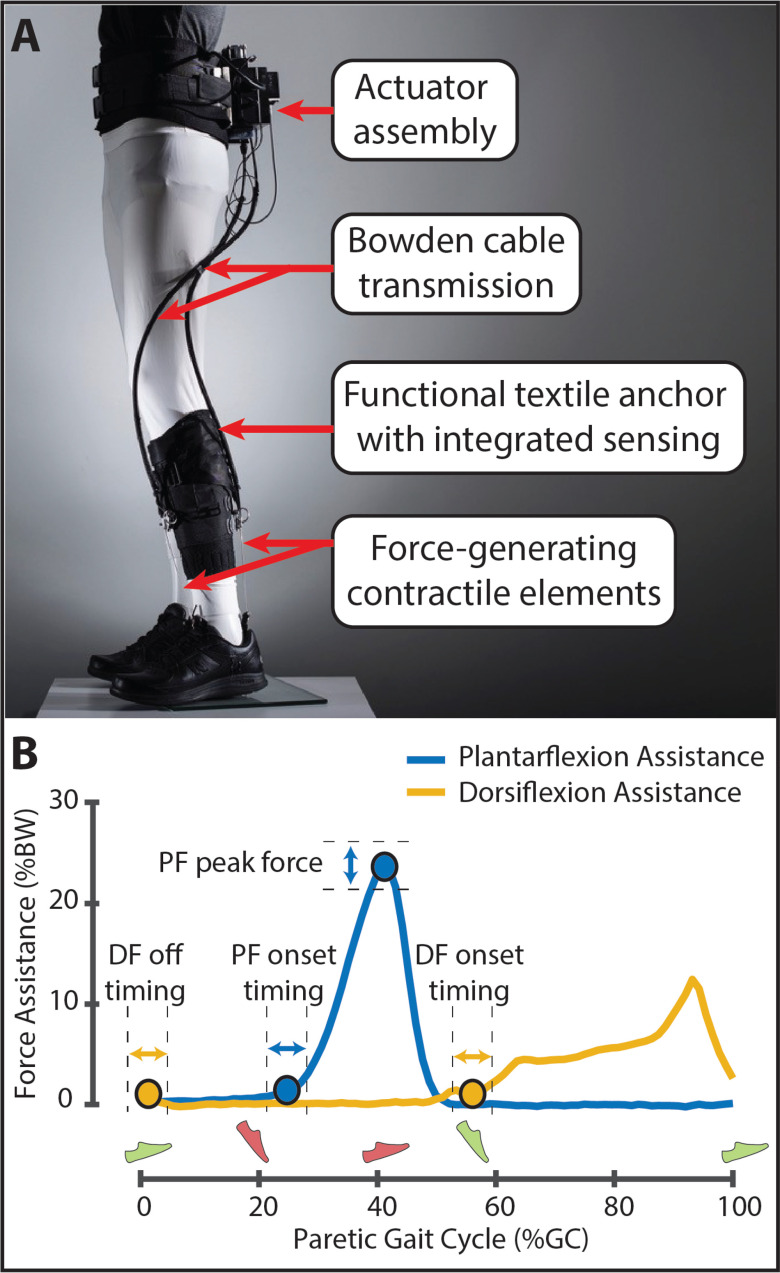
Soft robotic exosuits can improve the mechanics and energetics of walking after stroke. Building on this prior work, we evaluated the effects of the first prototype of a portable soft robotic exosuit.
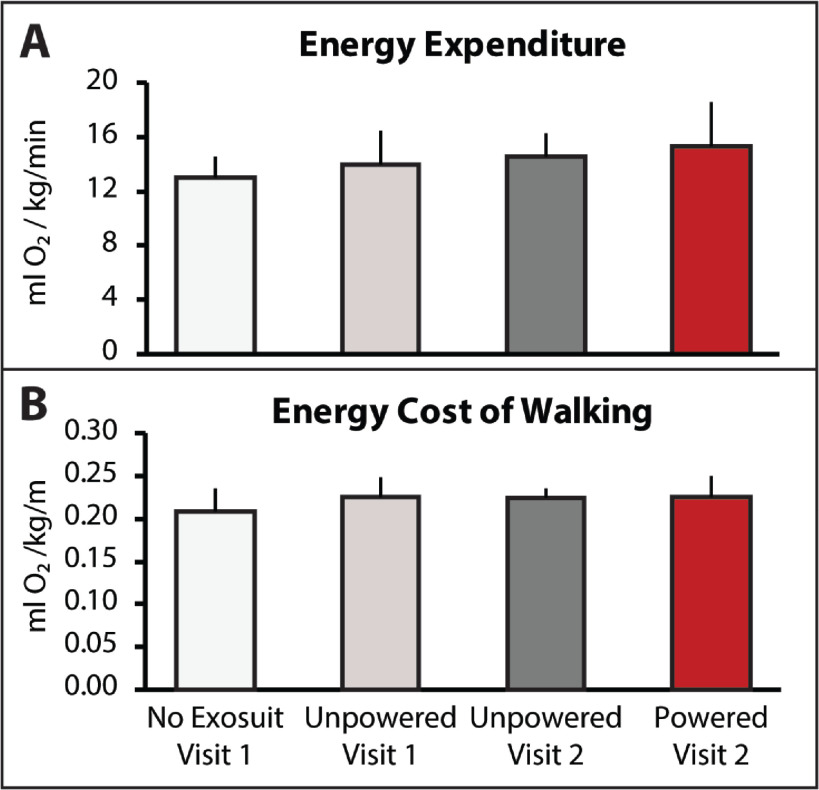
Exosuit-induced changes in the overground walking speed, distance, and energy expenditure of individuals post-stroke were evaluated statistically with alpha set to 0.05 and compared to minimal clinically important difference scores.
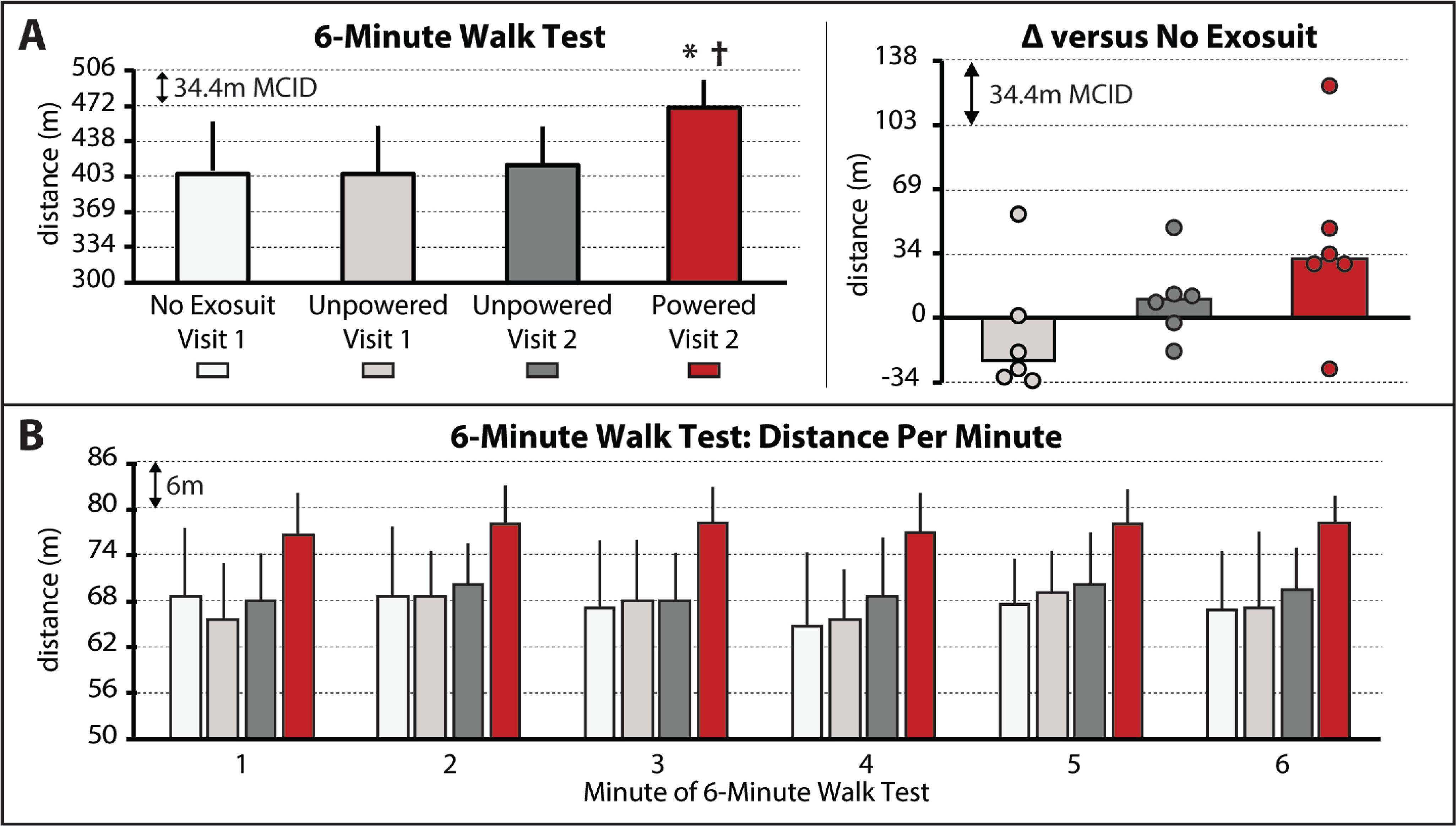
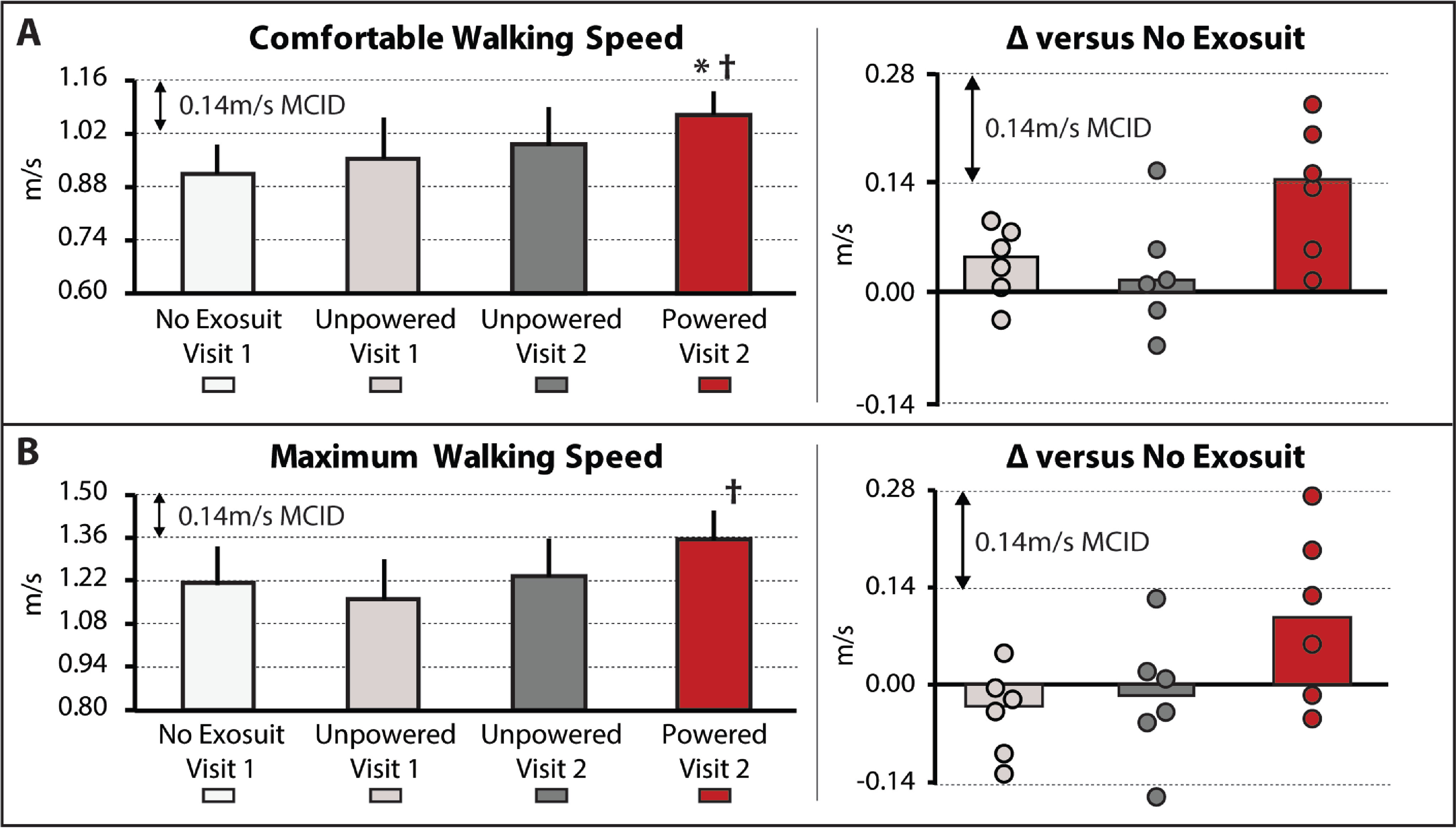
Compared to baseline walking without the exosuit worn, the 5kg exosuit did not substantially modify walking speed, distance, or energy expenditure when worn unpowered. In contrast, when the exosuit was powered on to provide an average 22.87±0.58 %bodyweight of plantarflexor force assistance during the paretic limb's stance phase and assist the paretic dorsiflexors during swing phase to reduce drop-foot, study participants walked a median 0.14±0.06 m/s faster during the 10-meter walk test and traveled 32±8 m farther during the six minute walk test.
Individuals post-stroke can leverage the paretic plantarflexor and dorsiflexor assistance provided by soft robotic exosuits to achieve clinically-meaningful increases in speed and distance.
软机器人外骨骼套装可改善中风后行走的力学和能量消耗情况。基于此前的这项工作,我们评估了便携式软机器人外骨骼套装首个原型的效果。
对中风后个体在地面行走时外骨骼套装引起的行走速度、距离和能量消耗变化进行统计学评估,将α值设定为0.05,并与最小临床重要差异评分进行比较。
与不穿外骨骼套装的基线行走相比,5千克的外骨骼套装在未通电穿着时,并未显著改变行走速度、距离或能量消耗。相比之下,当外骨骼套装通电,在患侧肢体站立期提供平均22.87±0.58%体重的跖屈肌力量辅助,并在摆动期辅助患侧背屈肌以减少足下垂时,研究参与者在10米步行测试中行走速度中位数加快了0.14±0.06米/秒,在6分钟步行测试中多走了32±8米。
中风后个体可利用软机器人外骨骼套装提供的患侧跖屈肌和背屈肌辅助,实现具有临床意义的速度和距离增加。