Donders Institute for Brain, Cognition and Behaviour, Radboud University, Nijmegen, The Netherlands.
Psychology Department, Max Planck Institute for Human Cognitive and Brain Sciences, Leipzig, Germany.
Sci Rep. 2021 Jul 27;11(1):15254. doi: 10.1038/s41598-021-94778-1.
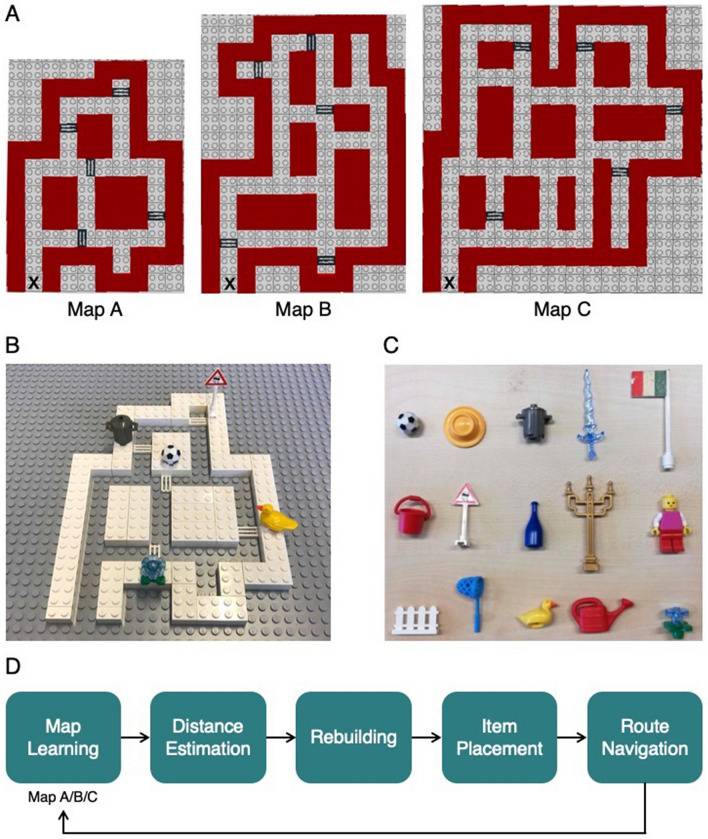
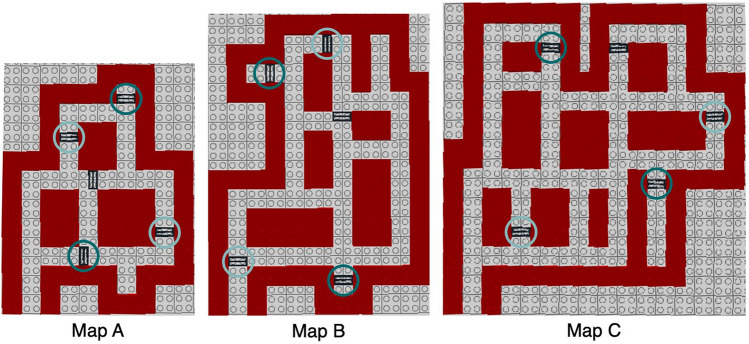
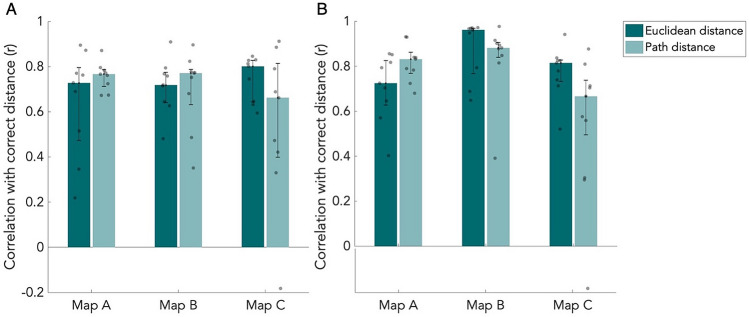
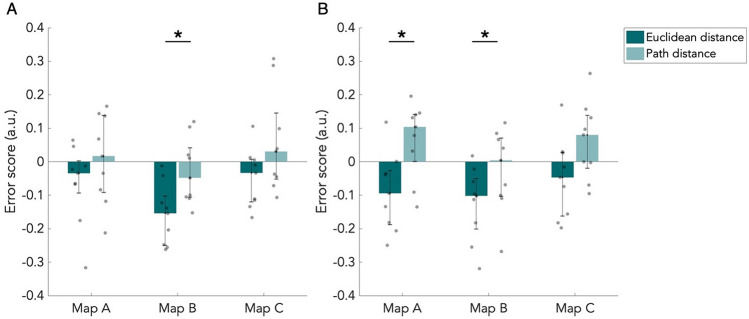
In this study, we compared cognitive map formation of small-scale models of city-like environments presented in visual or tactile/haptic modalities. Previous research often addresses only a limited amount of cognitive map aspects. We wanted to combine several of these aspects to elucidate a more complete view. Therefore, we assessed different types of spatial information, and consider egocentric as well as allocentric perspectives. Furthermore, we compared haptic map learning with visual map learning. In total 18 sighted participants (9 in a haptic condition, 9 visuo-haptic) learned three tactile maps of city-like environments. The maps differed in complexity, and had five marked locations associated with unique items. Participants estimated distances between item pairs, rebuilt the map, recalled locations, and navigated two routes, after learning each map. All participants overall performed well on the spatial tasks. Interestingly, only on the complex maps, participants performed worse in the haptic condition than the visuo-haptic, suggesting no distinct advantage of vision on the simple map. These results support ideas of modality-independent representations of space. Although it is less clear on the more complex maps, our findings indicate that participants using only haptic or a combination of haptic and visual information both form a quite accurate cognitive map of a simple tactile city-like map.
在这项研究中,我们比较了在视觉或触觉/动觉模态中呈现的城市环境小规模模型的认知地图形成。先前的研究通常只涉及有限数量的认知地图方面。我们希望结合这些方面中的几个,以阐明更完整的观点。因此,我们评估了不同类型的空间信息,并考虑了自我中心和他心视角。此外,我们比较了触觉地图学习和视觉地图学习。共有 18 名视力正常的参与者(9 名在触觉条件下,9 名在视触觉条件下)学习了三个城市环境的触觉地图。这些地图在复杂性上有所不同,并且有五个标记的位置与独特的物品相关联。参与者在学习每个地图后,估计物品对之间的距离,重建地图,回忆位置并导航两条路线。所有参与者在空间任务上总体表现良好。有趣的是,只有在复杂的地图上,参与者在触觉条件下的表现比视触觉条件下差,这表明视觉在简单地图上没有明显优势。这些结果支持空间的模态独立表示的想法。尽管在更复杂的地图上不太清楚,但我们的发现表明,仅使用触觉或触觉和视觉信息组合的参与者都形成了一个相当准确的简单触觉城市地图的认知地图。