Cimolato Andrea, Ciotti Federico, Kljajić Jelena, Valle Giacomo, Raspopovic Stanisa
Neuroengineering Lab, Department of Health Sciences and Technology, Institute for Robotics and Intelligent Systems, ETH Zürich, 8092 Zürich, Switzerland.
Rehab Technologies Lab, Fondazione Istituto Italiano di Tecnologia, 16163 Genova, Italy.
iScience. 2023 Feb 21;26(3):106248. doi: 10.1016/j.isci.2023.106248. eCollection 2023 Mar 17.
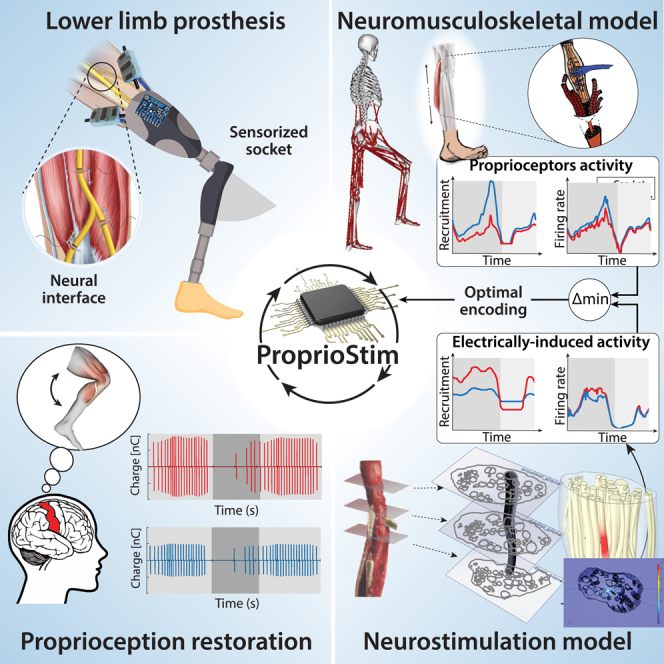
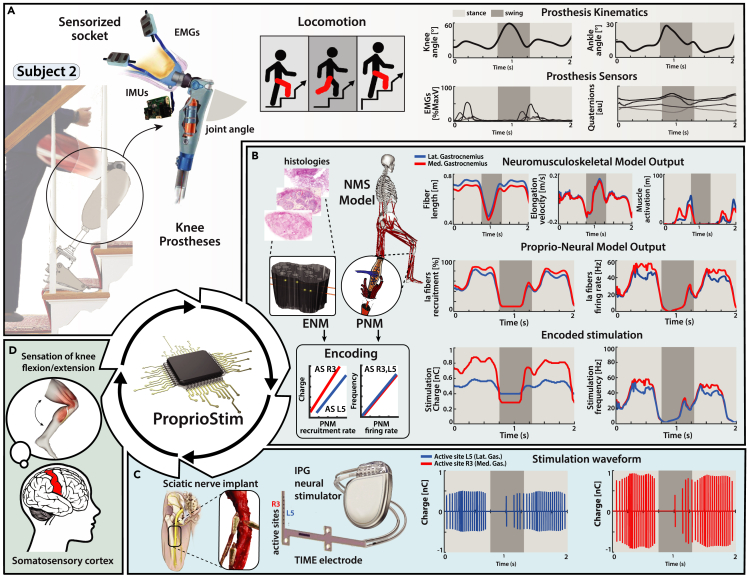
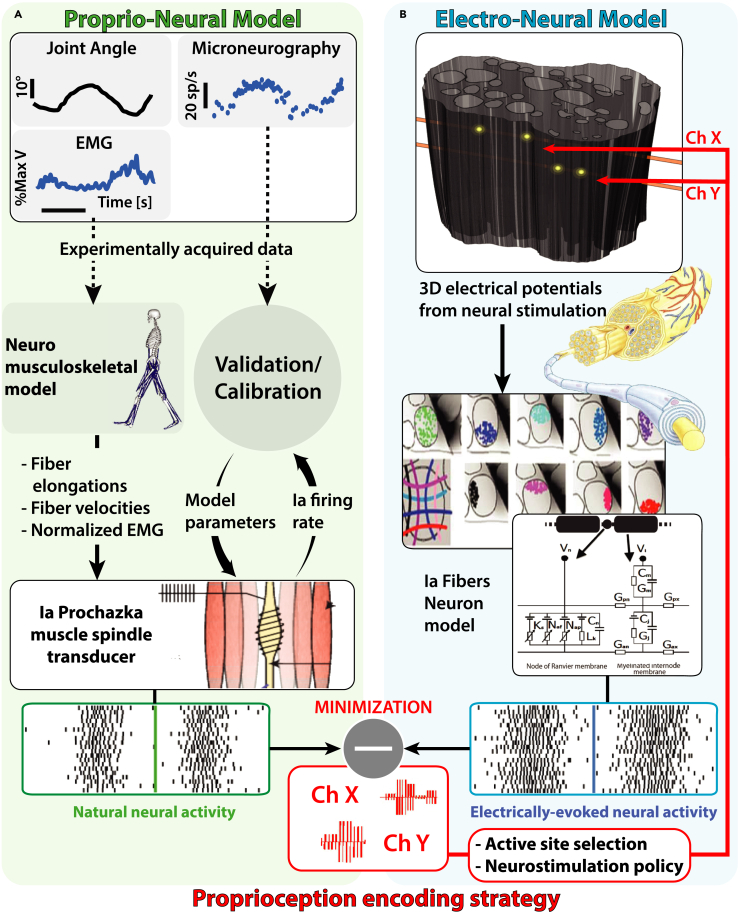
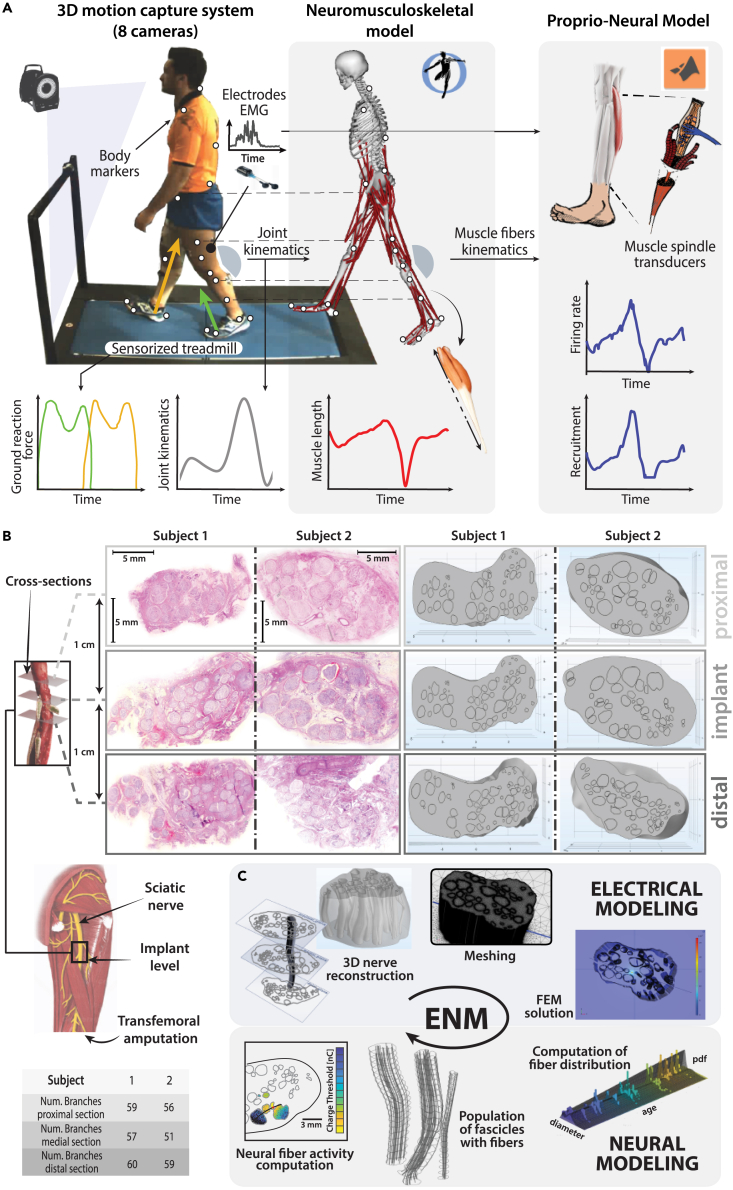
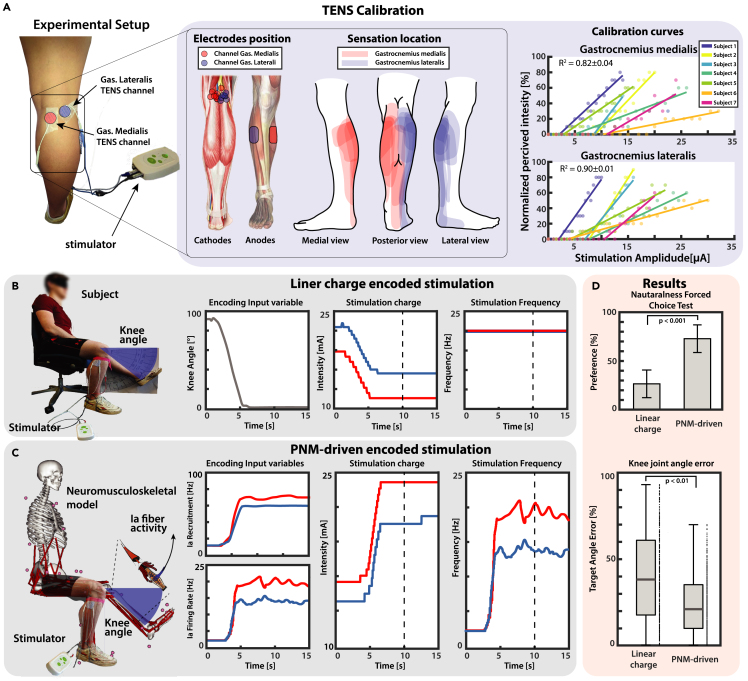
Peripheral nerve stimulation in amputees achieved the restoration of touch, but not proprioception, which is critical in locomotion. A plausible reason is the lack of means to artificially replicate the complex activity of proprioceptors. To uncover this, we coupled neuromuscular models from ten subjects and nerve histologies from two implanted amputees to develop ProprioStim: a framework to encode proprioception by electrical evoking neural activity in close agreement with natural proprioceptive activity. We demonstrated its feasibility through non-invasive stimulation on seven healthy subjects comparing it with standard linear charge encoding. Results showed that ProprioStim multichannel stimulation was felt more natural, and hold promises for increasing accuracy in knee angle tracking, especially in future implantable solutions Additionally, we quantified the importance of realistic 3D-nerve models against extruded models previously adopted for further design and validation of novel neurostimulation encoding strategies. ProprioStim provides clear guidelines for the development of neurostimulation policies restoring natural proprioception.
截肢者的外周神经刺激实现了触觉的恢复,但未恢复本体感觉,而本体感觉在运动中至关重要。一个合理的原因是缺乏人工复制本体感受器复杂活动的方法。为了揭示这一点,我们将来自十名受试者的神经肌肉模型与两名植入式截肢者的神经组织学相结合,开发了ProprioStim:一个通过电诱发神经活动来编码本体感觉的框架,该活动与自然本体感觉活动高度一致。我们通过对七名健康受试者进行非侵入性刺激,并将其与标准线性电荷编码进行比较,证明了其可行性。结果表明,ProprioStim多通道刺激感觉更自然,并有望提高膝关节角度跟踪的准确性,特别是在未来的可植入解决方案中。此外,我们量化了逼真的三维神经模型相对于先前用于新型神经刺激编码策略进一步设计和验证的挤压模型的重要性。ProprioStim为恢复自然本体感觉的神经刺激策略的开发提供了明确的指导方针。