Zhou Kevin C, Harfouche Mark, Cooke Colin L, Park Jaehee, Konda Pavan C, Kreiss Lucas, Kim Kanghyun, Jönsson Joakim, Doman Thomas, Reamey Paul, Saliu Veton, Cook Clare B, Zheng Maxwell, Bechtel John P, Bègue Aurélien, McCarroll Matthew, Bagwell Jennifer, Horstmeyer Gregor, Bagnat Michel, Horstmeyer Roarke
Department of Biomedical Engineering, Duke University, Durham, NC 27708, USA.
Ramona Optics Inc., 1000 W Main St., Durham, NC 27701, USA.
Nat Photonics. 2023 May;17(5):442-450. doi: 10.1038/s41566-023-01171-7. Epub 2023 Mar 20.
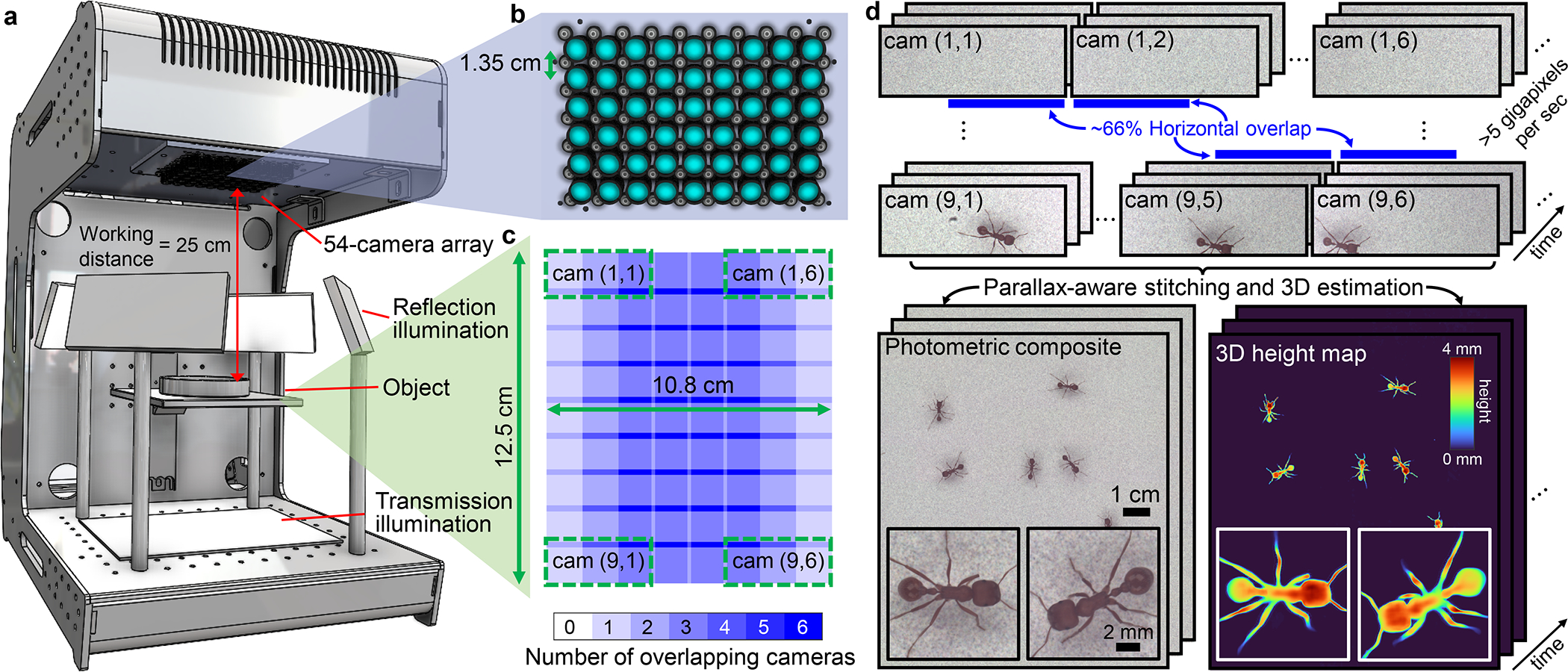
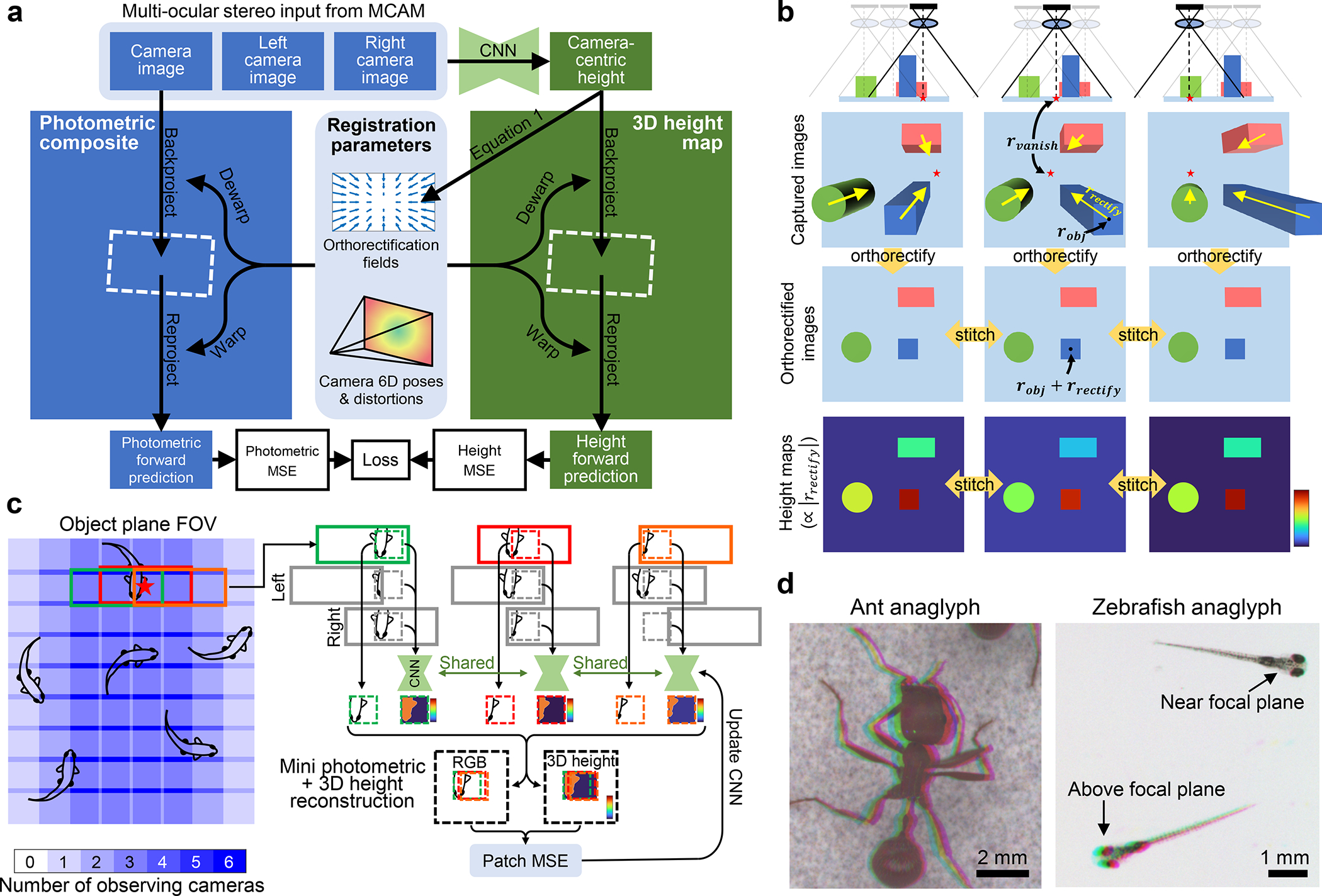
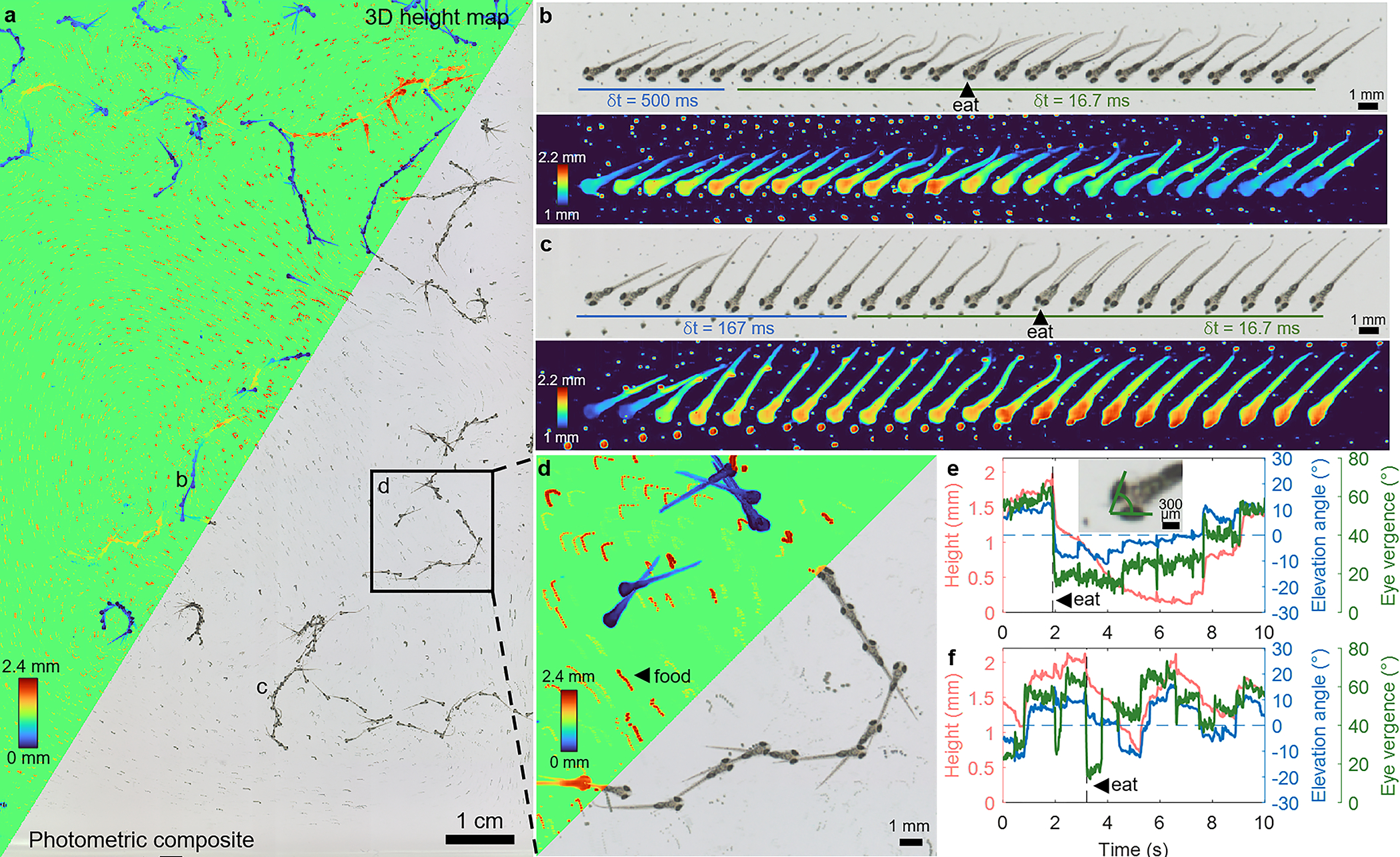
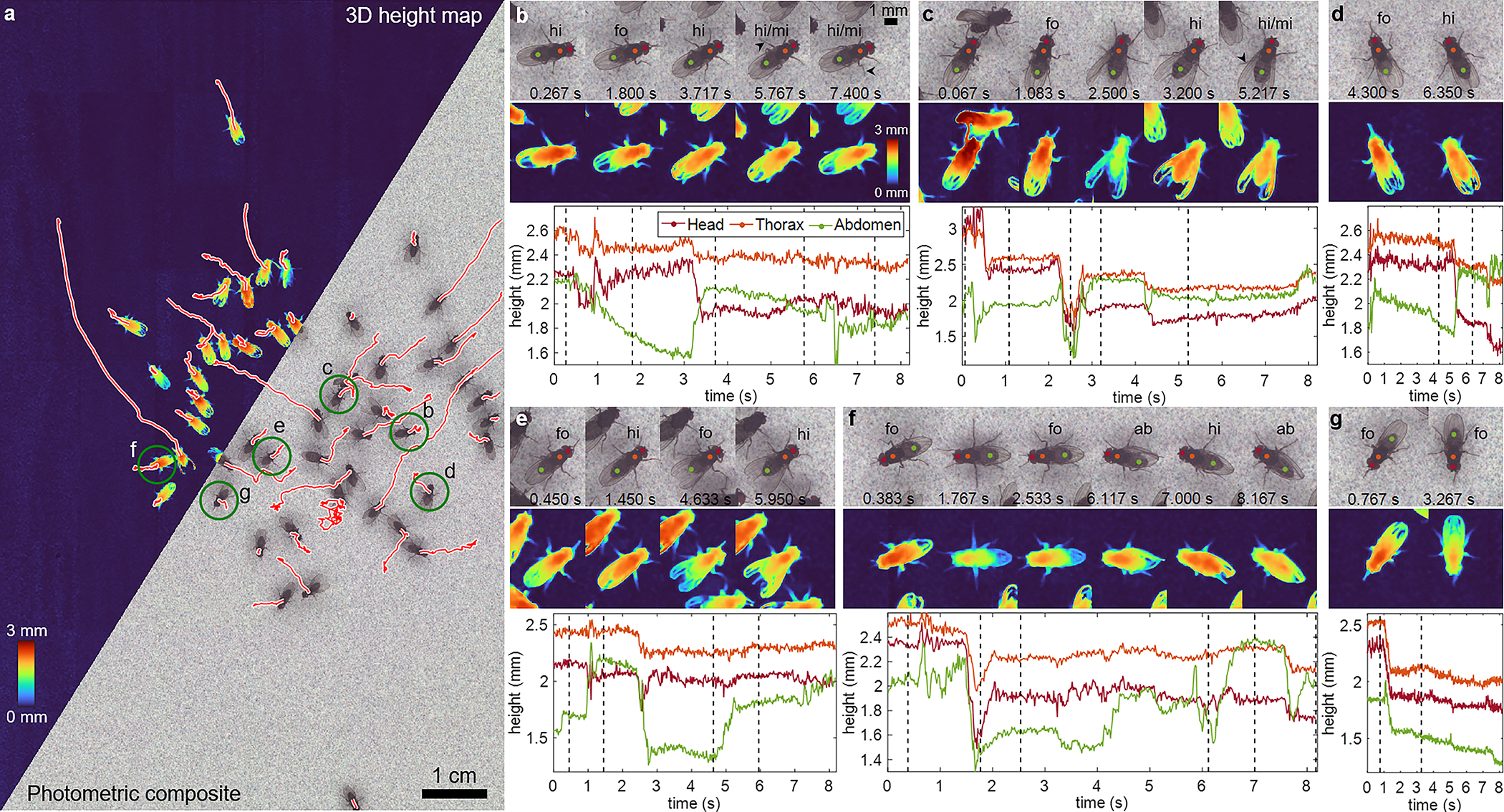
Wide field of view microscopy that can resolve 3D information at high speed and spatial resolution is highly desirable for studying the behaviour of freely moving model organisms. However, it is challenging to design an optical instrument that optimises all these properties simultaneously. Existing techniques typically require the acquisition of sequential image snapshots to observe large areas or measure 3D information, thus compromising on speed and throughput. Here, we present 3D-RAPID, a computational microscope based on a synchronized array of 54 cameras that can capture high-speed 3D topographic videos over an area of 135 cm2, achieving up to 230 frames per second at spatiotemporal throughputs exceeding 5 gigapixels per second. 3D-RAPID employs a 3D reconstruction algorithm that, for each synchronized snapshot, fuses all 54 images into a composite that includes a co-registered 3D height map. The self-supervised 3D reconstruction algorithm trains a neural network to map raw photometric images to 3D topography using stereo overlap redundancy and ray-propagation physics as the only supervision mechanism. The resulting reconstruction process is thus robust to generalization errors and scales to arbitrarily long videos from arbitrarily sized camera arrays. We demonstrate the broad applicability of 3D-RAPID with collections of several freely behaving organisms, including ants, fruit flies, and zebrafish larvae.
对于研究自由移动的模式生物的行为而言,能够以高速度和空间分辨率解析三维信息的宽视场显微镜是非常理想的。然而,设计一种能同时优化所有这些特性的光学仪器具有挑战性。现有技术通常需要采集连续的图像快照来观察大面积区域或测量三维信息,从而在速度和通量方面有所妥协。在此,我们展示了3D-RAPID,这是一种基于54个相机同步阵列的计算显微镜,它可以在135平方厘米的区域上捕获高速三维地形视频,在时空通量超过每秒50亿像素的情况下,实现高达每秒230帧的帧率。3D-RAPID采用一种三维重建算法,对于每个同步快照,该算法将所有54幅图像融合成一个包含配准三维高度图的合成图像。这种自监督三维重建算法训练一个神经网络,以立体重叠冗余和光线传播物理作为唯一的监督机制,将原始光度图像映射到三维地形。因此,所得的重建过程对泛化误差具有鲁棒性,并且可以扩展到来自任意大小相机阵列的任意长视频。我们通过对包括蚂蚁、果蝇和斑马鱼幼虫在内的几种自由活动生物的集合展示了3D-RAPID的广泛适用性。