Guo Ziyi, Zhuang Chenchen, Song Yihang, Yong Joel, Li Yi, Guo Zhong, Kong Biao, Whitelock John M, Wang Joseph, Liang Kang
School of Chemical Engineering, Australian Centre for NanoMedicine, The University of New South Wales, Sydney, NSW, 2052, Australia.
Medical College, Northwest Minzu University, Lanzhou, 730000, People's Republic of China.
Nanomicro Lett. 2023 Oct 24;15(1):236. doi: 10.1007/s40820-023-01207-1.
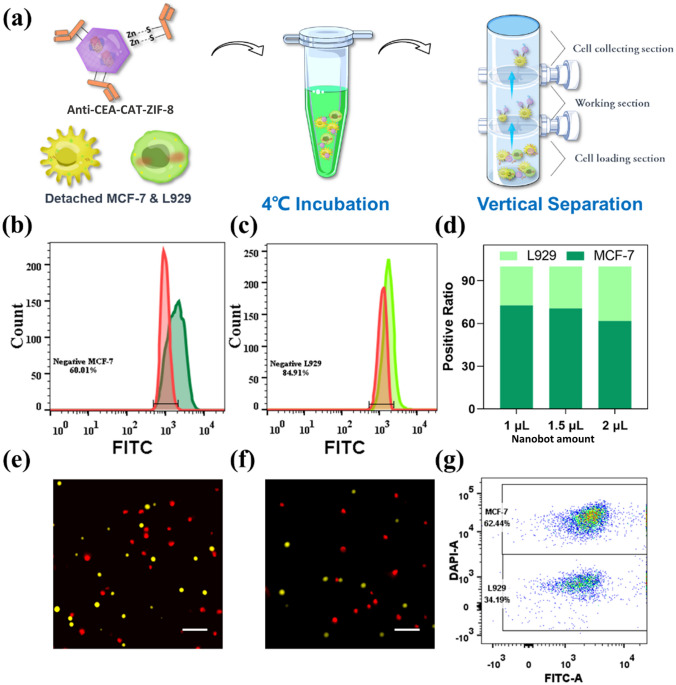
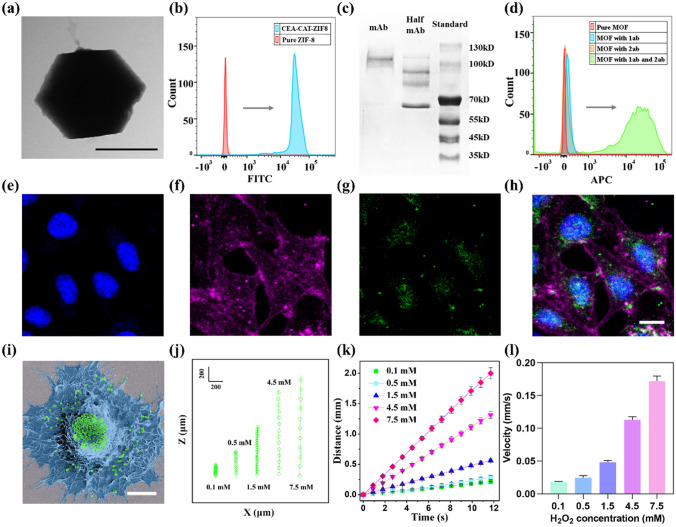
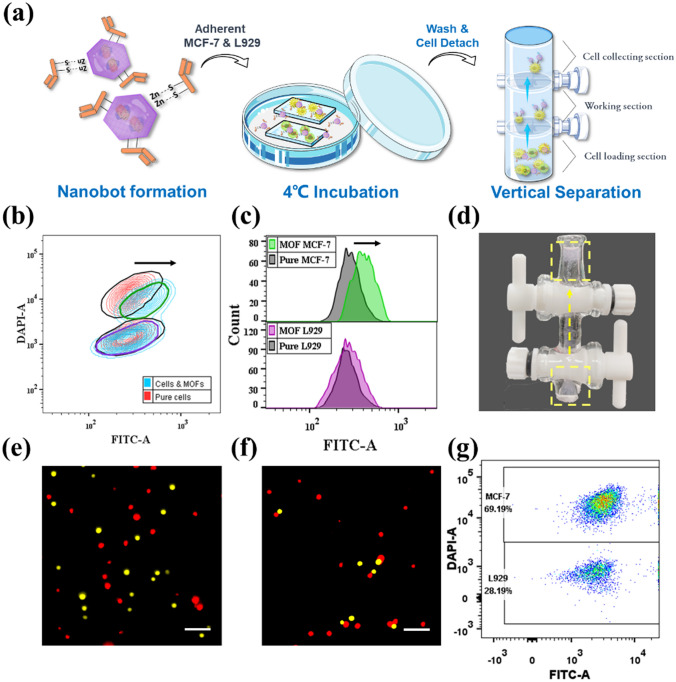
Autonomously self-propelled nanoswimmers represent the next-generation nano-devices for bio- and environmental technology. However, current nanoswimmers generate limited energy output and can only move in short distances and duration, thus are struggling to be applied in practical challenges, such as living cell transportation. Here, we describe the construction of biodegradable metal-organic framework based nanobots with chemically driven buoyancy to achieve highly efficient, long-distance, directional vertical motion to "find-and-fetch" target cells. Nanobots surface-functionalized with antibodies against the cell surface marker carcinoembryonic antigen are exploited to impart the nanobots with specific cell targeting capacity to recognize and separate cancer cells. We demonstrate that the self-propelled motility of the nanobots can sufficiently transport the recognized cells autonomously, and the separated cells can be easily collected with a customized glass column, and finally regain their full metabolic potential after the separation. The utilization of nanobots with easy synthetic pathway shows considerable promise in cell recognition, separation, and enrichment.
自主自推进纳米游动器代表了用于生物和环境技术的下一代纳米设备。然而,当前的纳米游动器产生的能量输出有限,只能在短距离和短时间内移动,因此难以应用于实际挑战,比如活细胞运输。在此,我们描述了基于可生物降解金属有机框架构建的纳米机器人,其具有化学驱动的浮力,可实现高效、长距离、定向垂直运动,以“寻找并获取”目标细胞。利用针对细胞表面标志物癌胚抗原进行表面功能化的纳米机器人,赋予其特异性细胞靶向能力,以识别和分离癌细胞。我们证明,纳米机器人的自推进运动能力能够充分自主运输被识别的细胞,并且分离出的细胞可以通过定制的玻璃柱轻松收集,最终在分离后恢复其全部代谢潜能。具有简单合成途径的纳米机器人在细胞识别、分离和富集方面显示出巨大的应用前景。